导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1735 播放
收藏
片段保存及分享
播放有问题?
请戳这里
西雅特汽车生产线
时长:6 分钟
类别:工业机器人技术
简介:在西雅特的机器人强化金属车间,2000个工业机器人与1700名员工同步工作,每68秒制造出一辆新汽车。
标签:
生产
工业机器人技术
智能制造
工业4.0
相关视频:
机器人是如何工作的
这个视频中,让我们了解机器人动作背后的机制以及机器人是如何制作的。
KUKA机器人离线编程软件
KUKA.Sim4.0适用于一般工业和汽车供应商的紧凑型可配置弧焊单元预组装并准备使用。通过KUKA.Sim,您可以在生产环境之外优化系统和机器人的运行。
人工智能速成课程 6非监督式学习
上一集中,我们介绍了监督式学习,本集中我们将介绍非监督式学习,即一类用于在数据中寻找模式的机器学习技术。我们将专注于执行无监督聚类算法,特别是K-means聚类,并向您展示如何从数据中提取有意义的模式。
工业机器人编程4
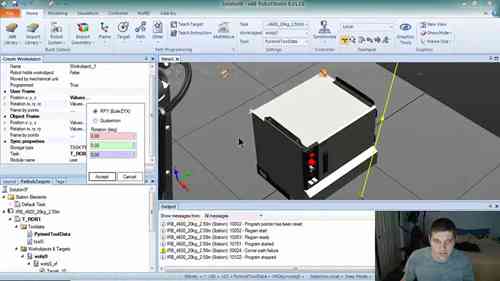
在进行正式的编程之前,就需要构建起必要的编程环境,机器人的工具数据和工件坐标系就需要在编程前进行定义。那么如何在Robotstudio软件中创建机器人工件坐标系?
ABB机器人焊接系统设计
WeldguideIV是一款强大的Thru-Arc跟踪传感器,基于专利技术,专为ABB机器人焊接系统设计。WeldguideIV旨在跟踪由铸件或其他预处理问题导致的焊接接头变化困难。
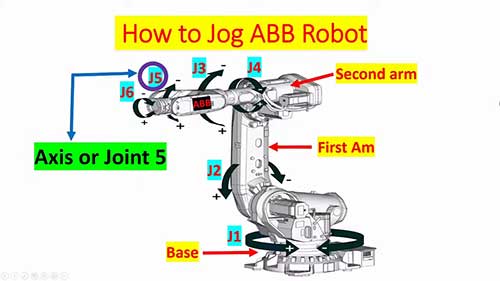
如何校准IRC5机器人控制器
我们将讨论六轴机器人以及如何校准IRC5控制器,当你没有校准摆锤工具时如何在IRC5上进行精细校准。
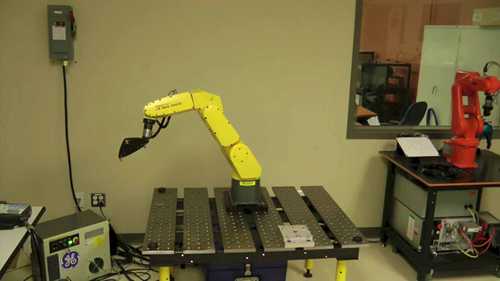
工业机器人的校准和精度验证
发那科LR Mate 200iC是一款多功能6轴小型机器人,常用于搬运上下料。为了保持机器人的绝对精度,必须进行校准,这里介绍了校准发那科LR Mate 200iC工业机器人的两种方法。
创建虚拟工作站的步骤
在机器人领域,创建虚拟工作站通常用于机器人程序的开发和调试。本片将指导你创建虚拟工作站的步骤。
观看记录: