导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
214 播放
收藏
片段保存及分享
播放有问题?
请戳这里
川崎机器人碰撞检测功能
时长:4 分钟
类别:工业机器人技术
简介:碰撞检测功能非常适合需要用到工业机器人夹具的应用,特别是当安装的夹爪暴露于受损零件或机器人操作易碎工件时
标签:
教学
工业机器人
工业机器人应用
相关视频:
人工智能速成课程 6非监督式学习
上一集中,我们介绍了监督式学习,本集中我们将介绍非监督式学习,即一类用于在数据中寻找模式的机器学习技术。我们将专注于执行无监督聚类算法,特别是K-means聚类,并向您展示如何从数据中提取有意义的模式。
未来机器人的不同类型
机器人已经被应用于很多不同的行业中。按机器人的用途分类的话可以分成工业机器人、探索机器人、服务机器人、军事机器人等。
机器人焊接和激光跟踪技术
机器人焊接和激光跟踪技术,用于自适应机器人焊接路径调整,以确保焊接质量。利用二维/三维轮廓传感器进行焊缝引导,适用于全自动机器人焊接单元,传感器通过激光三角测量检测接头。
机器人管件搬运系统
KUKA合作伙伴ARCSpecialties开发并集成了这个机器人管件搬运系统。这个机器人系统降低了金属管件的搬运成本并增加了产出。
工业机器人编程2
RobotStudio是一款ABB机器人仿真软件,用户可以借助虚拟机器人技术进行离线编程,本集ABB机器人编程教程的主要内容是讲解机器人基本的运动控制指令。
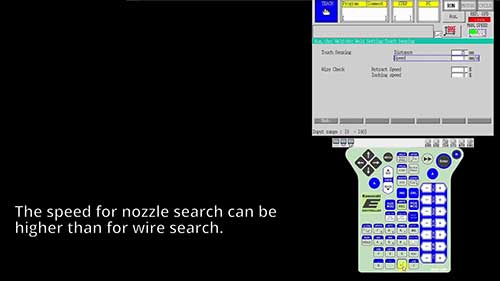
川崎机器人触摸感应功能
触摸感应涉及通过确定焊接工件的位移来找到位移矢量,方法是通过测量点的位置并将其与软件中存储的值进行比较。机器人可按照给定的模式在几个点上触摸要测量的物体。
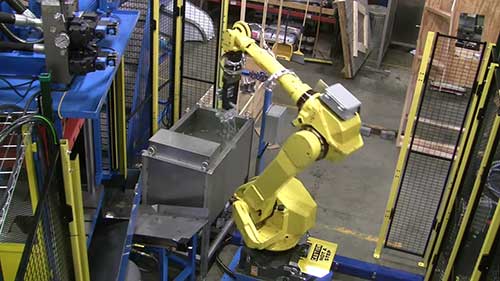
FANUC机器人压铸抚育系统
MWES是复杂生产系统集成的创新者和领导者,该公司为客户提供了一台FANUC机器人来抚育压铸机作业,同时该系统可将压铸件装载到修整压机中。
5步教你开发出专家系统
本视频展示了教你开发出专家系统的五个步骤,第一了解用户需求,第二找专家获取知识库的数据,第三构建知识库以及推理机,第四,设计输入和输出屏,第五创建出专家系统。
观看记录: