导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
217 播放
收藏
片段保存及分享
播放有问题?
请戳这里
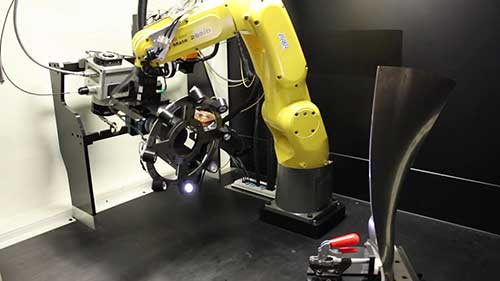
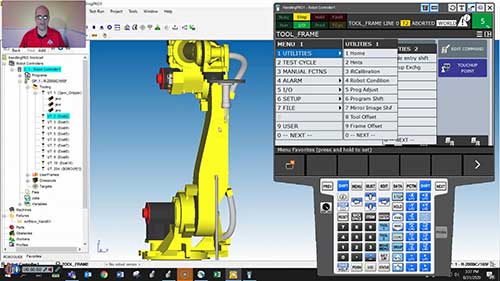
FANUC机器人编程1
时长:13 分钟
类别:工业机器人技术
简介:简要介绍如何编程控制发那科机器人进行圆周运动。
标签:
教学
工业机器人
工业机器人编程
相关视频:
发动机扇叶机器人检测系统
FANUC授权的系统集成商AV&R为其飞机维护和大修客户设计了一种创新的机器人检测和修复系统。此前,这是一个手动且非常耗时的过程,可能需要数天才能完成,而现在的机器人自动化系统,完成任务只需要30分钟到两个小时不等。
三点法设置工具坐标系
本片简要介绍如何使用三点法来设置发那科工业机器人的工具坐标系。
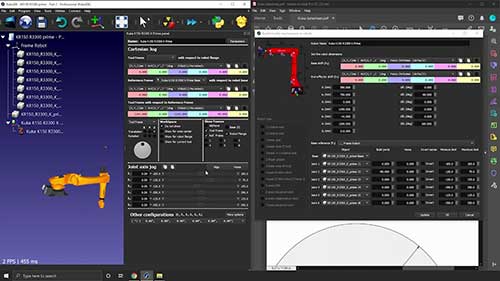
工业机器人建模2
学习如何深入了解机器人的相关参数,以确保在RoboDK软件中建模的机器人与真实的机器人保持一致。
FANUC机器人定预防性维护1
学习如何对FANUCR-2000iC165F地面安装机器人进行定期维护。Acieta的机器人系统工程师ChrisBosquez将详细介绍添加润滑脂和更换电池的步骤。
发那科机器人的世界坐标系
世界坐标系是被固定在空间上的标准直角坐标系,其被固定在由机器人事先确定的位置。Fanuc机器人的世界坐标系原点位置的大致标准是什么呢?收看节目了解如何给fanuc机器人设立世界坐标系。
发那科机器人编程培训 03 备份和恢复
掌握机器人系统备份和恢复是非常重要的,那么,到底该如何做呢?我们一起来看这段演示视频。
人工智能速成课程 10符号人工智能
今天我们将讨论符号人工智能,也被称为“老式人工智能”。符号人工智能与我们目前所讨论的现代神经网络确实不同,相反,它使用符号来表示问题,然后使用逻辑来寻找解决方案。这种类型的人工智能被广泛应用于视频游戏和专家系统中,比如那些杂货店用来管理库存和保险公司用来设定费率的系统。今天我们将向你展示如何表示符号及其关系,如何建立知识库,然后介绍一些简单的命题逻辑,这是这些人工智能系统的核心。
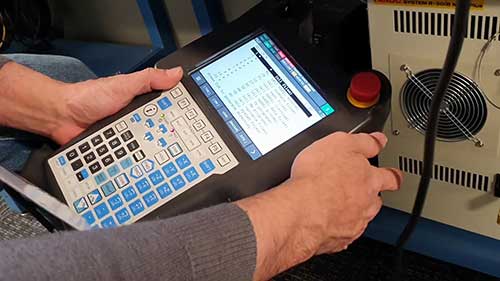
ABB机器人IRC5示教器功能演示
本片是ABB最新版本机器人操作设备IRC5示教器的功能演示视频。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问