导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
272 播放
收藏
片段保存及分享
播放有问题?
请戳这里
工业机器人建模2
时长:8 分钟
类别:工业机器人技术
简介:学习如何深入了解机器人的相关参数,以确保在RoboDK软件中建模的机器人与真实的机器人保持一致。
标签:
教学
工业机器人
工业机器人编程
相关视频:
IRC5控制器:紧急停止
介绍了ABB第五代机器人控制器IRC5最常见的停止功能——紧急停止。
焊接机器人与焊接自动化
由UniversalRobotsUR10e协作机器人驱动的DIYVectisCobot焊接工具可实现焊接自动化,快速换模和优化生产。
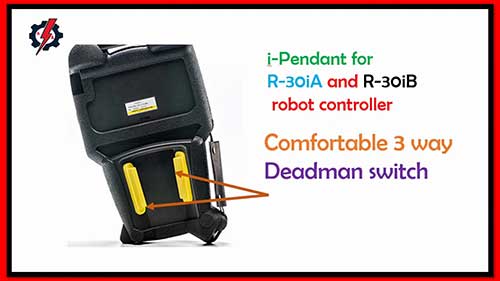
发那科机器人编程培训 01 示教器
示教器是一种可用于远程控制机器人的装置。今天,我们将了解发那科机器人示教器上的各个按钮及其功能。
人工智能速成课程 13创建游戏通关的AI
今天,我们将创建一个叫“垃圾爆破者”的游戏,然后在创建一个人工智能来通关。我们将使用像进化神经网络这样的机器学习技术以及一个精心设计的适应度函数来创建一个不可阻挡的人工智能。
库卡点焊机器人演示
我们将带大家参观位于德国奥格斯堡总部的库卡点焊技术中心,了解点焊机器人的使用。
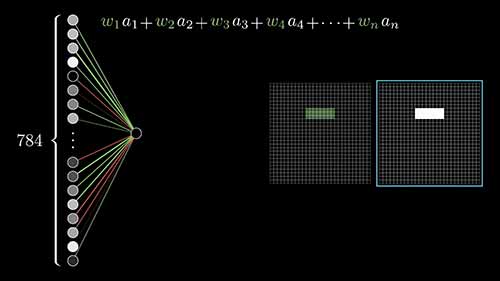
什么是人工神经网络
人工神经网络(ArtificialNeuralNetworks,简写为ANNs)是一种模仿动物神经网络行为特征,进行分布式并行信息处理的算法数学模型。本视频将用生动的例子向你讲解人工神经网络的概念。
工业4.0——机器人制造业的复兴
在过去的10年里,机器人的使用量一直在上升,随着机器人自动化的好处变得越来越普遍,这一趋势只会继续下去。
OmniCore控制器:网络安全
了解ABB的OmniCore机器人控制器如何解决网络安全问题。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问