导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
193 播放
收藏
片段保存及分享
播放有问题?
请戳这里
ROS基础概述
时长:3 分钟
类别:智能机器人技术
简介:简要介绍了ROS(机器人操作系统)。你将了解什么是ROS(机器人操作系统)以及为什么我们需要它来开发机器人。
标签:
教学
智能机器人
机器人操作系统
相关视频:
机器人建模
Gazebo是一款免费的机器人仿真软件,我们学习如何使用Gazebo模拟器以及ROS操作系统搭建机器人。
Ascento安保机器人
严重的劳动力短缺问题即将成为过去?瑞士新创公司Ascento推出了他们的最新力作——AscentoGuard安保机器人!这款超可爱的机器人不仅可以巡逻工厂,还能侦测入侵者。
机器人非化学除草演示
SmallRobotCompany将机器人和人工智能结合以实现农业需求的自动化。SmallRobot的产品包括Tom机器人、Dick机器人和Harry机器人。片中展示了这些机器人进行非化学除草的过程。
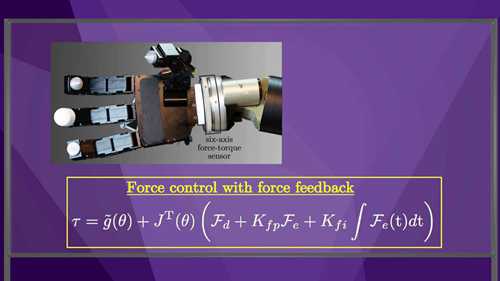
力控制
本教程描述了机器人基于雅可比矩阵转置的力控制,包括有和没有末端执行器力-力矩反馈。
理解ROS节点与话题
节点是ROS软件包中的一个可执行文件。ROS节点使用ROS客户端库与其他节点通信。节点可以发布或订阅话题,也可以提供或使用服务。
安保机器人巡检
部署安保机器人确保了在受保护设施内不增加安保人员数量的情况下提高安全水平。安保机器人在游艇俱乐部周边巡逻并能够在200英尺范围内检测到人类活动。
索菲亚机器人
机器人索菲亚是一款有着非常逼真的外表和举止,与人互动能力很高的仿人机器人。疫情期间,索菲亚生产商决定量产这款机器人,以帮助世界应对疫情。
LeoBots清洁机器人
LeoBots是一系列清洁机器人,由4种不同的型号组成。每台机器都被要求执行一项特定的任务,以便在其清洁操作中达到最高效率。
观看记录:








 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问