导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
239 播放
收藏
片段保存及分享
播放有问题?
请戳这里
了解ROS节点
时长:11 分钟
类别:智能机器人技术
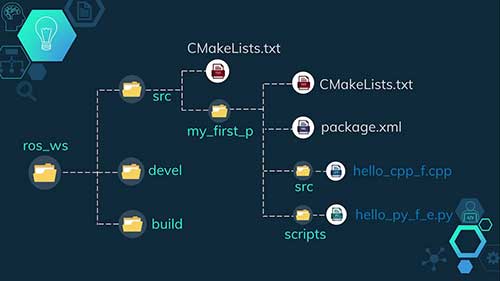
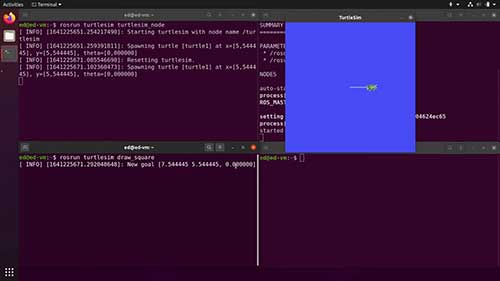
简介:节点是ROS中最重要的概念之一。每个ROS运行实例被称为节点。我们将从终端启动几个节点,以了解什么是ROS节点。
标签:
教学
智能机器人
机器人操作系统
相关视频:
ROS入门02:ROS命令
介绍一些有用的ROS命令,例如:roscore、roscd、rosls、ros节点和ros话题。
农业机器人塑造农业未来
农业技术领域已经迎来了未来,农业机器人已经在农田中广泛应用,农业的各个方面都以某种方式实现了自动化。
阿西莫机器人发展史
阿西莫是一种智能机器人,由日本本田公司于1986年开始研制,那么在这40多年的时间里,这款类人机器人取得了怎样的进展呢?我们将为你回顾阿西莫的发展史。
7种新型智能农业机器人
下一代农业机器人和自动化技术将颠覆农业的未来,解放农民的双手。
rosrun命令
rosrun命令用于在ROS中启动一个指定软件包中的节点。通过rosrun命令,我们可以指定软件包和节点的名称,以便在终端中启动这个节点。
了解ROS服务通信
我们将在ROS中启动几个节点并对它们进行内省,以了解什么是ROS服务通信。
路虎SG消防机器人
奥地利路虎消防机器人LUF300SG是消防作业的领导者。它的喷水距离可达85米,适用于大型火灾。
机器人路径规划6
这一集介绍的是用于机器人路径规划的网格算法,其中自由c空间可以使用标准图进行搜索的正则网格表示,为了提高效率,也可以使用多分辨率网格。
观看记录:







 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问