导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
179 播放
收藏
片段保存及分享
播放有问题?
请戳这里
仿生蝙蝠机器人
时长:3 分钟
类别:智能机器人技术
简介:一只倒挂房梁的蝙蝠可能会让你尖叫,但当你看到这只蝙蝠,你会有什么感觉呢?
标签:
教学
智能机器人
仿生机器人
相关视频:
行李运输机器人
人工智能是当今炙手可热的领域,其应用在医疗、刑侦、艺术等领域都被广泛应用。那么我们来看看人工智能在机场的应用。本视频展示了美国达拉斯市福特·伍斯机场机器人为国际航线旅客实施行李转运。
O-R3户外安保机器人
O-R3是OTSAW的户外安保机器人,现在推出人脸识别技术!通过将自动驾驶和人工智能技术与出色的数据收集和分析能力相结合,O-R3为您的安全团队提供创新和关键的支持,以预防和打击犯罪。?
二阶误差动力学
本视频研究的是以二阶线性常微分方程来描述的误差动力学模型。
传感器融合与跟踪5
目标跟踪是利用各种类型的传感器获得的关于目标信息,对目标的真实状态以及未来的状态进行估计和预测的一门技术。这一集我们采用的是使用交互式多模型算法,来进行目标跟踪的方法。
了解ROS服务通信
我们将在ROS中启动几个节点并对它们进行内省,以了解什么是ROS服务通信。
机器人的智能视觉系统
工业研究所研发出的只能视觉系统能使机器人解读自己所看到的视觉世界,根据视觉信息行动,并从经验中学习,并不断改进性能。
Thorvald农业机器人
Thorvald是由挪威奥斯陆大学(NMBU)的机器人和控制组开发的一种机器人平台。这个平台旨在为农业和园艺领域提供自动化解决方案,以帮助农民和园艺工作者进行种植、收获和其他农业任务。
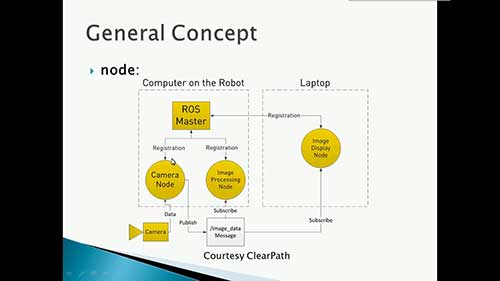
ROS入门01:文件系统
ROS基本概念介绍,包括节点管理器、节点、话题、消息和服务通信以及文件系统。
观看记录: