导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
405 播放
收藏
片段保存及分享
播放有问题?
请戳这里
太空机器人研发挑战
时长:2 分钟
类别:智能机器人技术
简介:NASA的太空机器人竞赛要求团队开发R5机器人,R5机器人需要具备有效地协助NASA任务(如前往火星)的能力。
标签:
教学
智能机器人
太空机器人
相关视频:
逆向运动学3
这一集将延续上一集的内容,介绍数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由变换矩阵表示。
太空机器人的合作
多机器人合作是被视为行星探索中有前景的几项关键技术之一。在PRO-ACT项目中,这些技术得到了应用和进一步发展,这些机器人系统预计将共同执行任务。
混合运动力控制
本视频介绍了混合运动力控制:控制机器人在无约束方向上产生期望的运动和在约束方向上产生期望的力。
自动园艺修剪机器人
通过运行自动修剪机器人系统,可在葡萄树之间实现精确修剪。请查看我们在耕作、水果、蔬菜、乳制品、动物生产、水产养殖和新型食品领域的所有创新实验。
扭矩或力输入的运动控制2
这一集里,我将比较PD和PID控制对单个机器人关节在重力下运动的设定值控制,其中控制输入是一个力矩。
机器人选择性顺应控制实验
该实验比较了位置控制器对补偿和未补偿干扰的反应,以展示力矩可控制的机器人关节执行机构与6自由度交互力传感器相结合的好处。
如何创建ROS工作空间01
学习如何下载Ubuntu20.04ISO镜像并在虚拟机中安装。此外,你还将学习如何在VirtualBox中最大化屏幕时调整Ubuntu的显示。
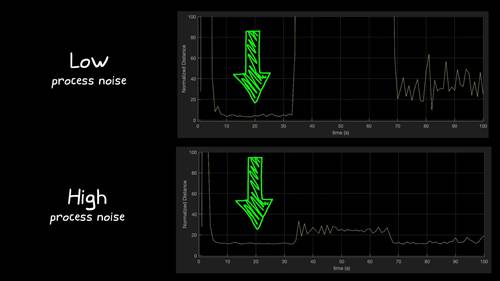
传感器融合与跟踪4
本视频解释了如何通过使用交互式多模型滤波器估计状态来改善跟踪单个对象。
观看记录:







 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问