导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
229 播放
收藏
片段保存及分享
播放有问题?
请戳这里
机器人选择性顺应控制实验
时长:3 分钟
类别:智能机器人技术
简介:该实验比较了位置控制器对补偿和未补偿干扰的反应,以展示力矩可控制的机器人关节执行机构与6自由度交互力传感器相结合的好处。
标签:
教学
智能机器人
机器人控制
相关视频:
线性误差动力学
本视频介绍了线性误差响应,误差动力学由线性常微分方程来描述,也可以表示为一阶耦合微分方程,xdot = Ax。
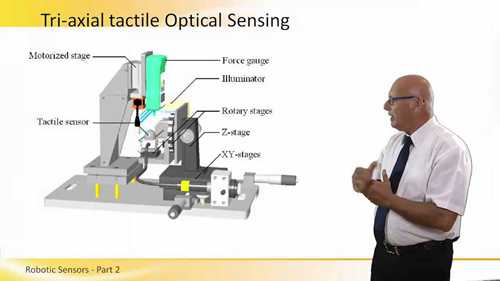
机器人用传感器2
在该教程的第一部分中,我们学习了常用的机器人传感器,那么在这一集里我们将学习一些较特殊的传感器,如,扫描传感器,旋转传感器,障碍物探测器,红外温度传感器,极化传感器等。
Atlas和Handle机器人
波士顿动力公司的机器人Atlas和Handle是世界上最具活力的类人机器人,Atlas已经掌握了倒立、360度翻转、旋转等多项技能,Handle机器人能够载重、下蹲和跨越障碍物,再次让我们大开眼界。让我们一起去看看这两款机器人到底有多先进吧。
柔性机器人的阻抗控制
装备有可变刚度执行器的柔性机器人对冲击具有鲁棒性并且能效高。然而,由于关节中存在真实的弹簧,即使电机不运动,软机器人也可能产生振荡。
传感器融合与跟踪2
该视频介绍了如何使用磁力计,加速计和陀螺仪估算物体的方向。目的是展示这些传感器如何为解决方案做出贡献,并解释一些注意事项。
机器人用传感器1
机器人变得越来越智能,这与它们分析传感器状态的能力提升有关,本视频将回顾机器人会使用的不同类型传感器,包括触觉、声音、光、超声波、速度、振动传感器等。
触觉传感技术概述
触觉传感是一种能够感知和测量物体表面特性的技术。在机器人技术中,触觉传感器可以帮助机器人感知和理解周围环境,以便更准确地进行操作和互动。
手术机器人开启医疗新时代
医疗保健正在经历技术颠覆,因为机器人手术的进步正在帮助外科医生进行更少侵入性的手术。本片介绍了达芬奇机器人手术系统的优势。
观看记录: