导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1839 播放
收藏
片段保存及分享
播放有问题?
请戳这里
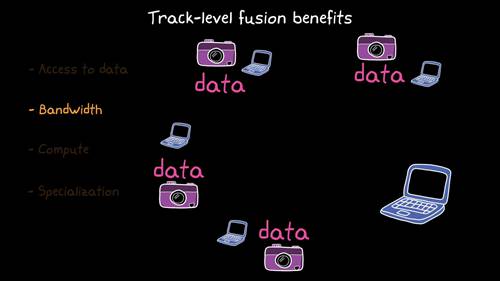
传感器融合与跟踪4
时长:16 分钟
类别:智能机器人技术
简介:本视频解释了如何通过使用交互式多模型滤波器估计状态来改善跟踪单个对象。
标签:
教学
智能机器人技术
传感器融合
相关视频:
传感器融合与跟踪5
目标跟踪是利用各种类型的传感器获得的关于目标信息,对目标的真实状态以及未来的状态进行估计和预测的一门技术。这一集我们采用的是使用交互式多模型算法,来进行目标跟踪的方法。
传感器融合与跟踪6
您将在视频中看到两种不同的跟踪体系结构,并了解如何选用适合的跟踪体系结构。
颠覆农业领域的机器人
农业机器人让农民得以从效率低,重复高和乏味的劳作中解放双手,使他们能够更加专注于提高整体产量。目前农业上一些最常见的机器人主要用于农产品收获和采摘以及杂草控制。
通过脑机接口技术获得触觉
美国国防部高级研究计划局首次在人体上演示了一项前沿技术,即将机械臂与神经系统相连接,让个体从大脑中感知触觉。
5种最佳人工智能编程语言
人工智能将改变全球经济趋势,如果你想进行AI开发,那就先来了解这5种开发AI的最佳语言吧。
Atlas和Handle机器人
波士顿动力公司的机器人Atlas和Handle是世界上最具活力的类人机器人,Atlas已经掌握了倒立、360度翻转、旋转等多项技能,Handle机器人能够载重、下蹲和跨越障碍物,再次让我们大开眼界。让我们一起去看看这两款机器人到底有多先进吧。
扭矩或力输入的运动控制1
本视频介绍了针对单个机器人关节的比例积分导数(PID)控制。
脑机接口能改变人类未来吗
想象一下,你可以用意念控制你的智能手机、电脑,用思维来打字。特斯拉首席执行官埃隆·马斯克表示,这些很快就会成为现实,让我们去看看Neuralink公司最新的研究进展吧。
观看记录:








 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问