导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1903 播放
收藏
片段保存及分享
播放有问题?
请戳这里
传感器融合与跟踪5
时长:16 分钟
类别:智能机器人技术
简介:目标跟踪是利用各种类型的传感器获得的关于目标信息,对目标的真实状态以及未来的状态进行估计和预测的一门技术。这一集我们采用的是使用交互式多模型算法,来进行目标跟踪的方法。
标签:
教学
智能机器人技术
传感器融合
相关视频:
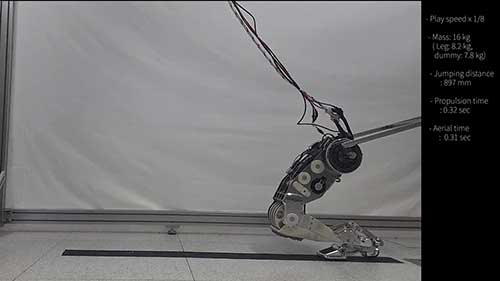
人形机器人腿
Hyperleg是一款具有高度动态性的机器人腿,可进行各种复杂、精细的运动,如行走、短跑、跳跃或跳舞。
路虎HF消防机器人
路虎300HF是具有监控喷嘴的消防机器人。它的喷水距离可达110米,适用于炼油厂等大型火灾。
真实存在的10种机器人
来自德国的机器人研发公司Festo的机器人动物家族正在壮大。该公司陆续推出了许多新型仿生机器人,例如:一群可以相互交流的蚂蚁,以及蝴蝶和蜻蜓,这些仿生机器人有什么特点呢?能做什么?具有相应昆虫的行为特征吗?收看视频。
清洁机器人工作原理
清洁机器人正在成为最受欢迎的新家用电器之一。与传统的吸尘器不同,该机器人可以在地面上导航并避开障碍物来清洁房间。
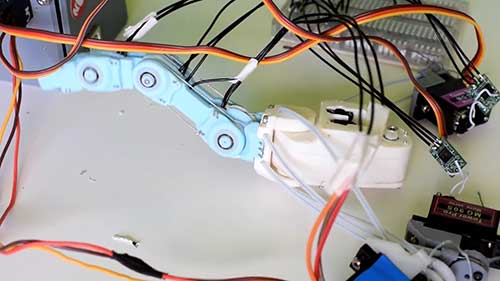
仿生机械手 03 仿生手指原型设计
使用FDM打印和Arduino,在Fusion 360中进行设计仿生手指原型,最后测试仿生手的三个连续关节。
O-R3户外安保机器人
O-R3是OTSAW的户外安保机器人,现在推出人脸识别技术!通过将自动驾驶和人工智能技术与出色的数据收集和分析能力相结合,O-R3为您的安全团队提供创新和关键的支持,以预防和打击犯罪。?
智能家用机器人
安娜是一个半人形机器人,大约130厘米高,70厘米宽。预计重量在50到70公斤之间,由位于哥本哈根的AnnaOneApS开发,安娜是一个智能家用机器人。
了解ROS话题通信
我们将在ROS中启动几个节点并对它们进行内省,以便了解什么是ROS话题通信。
观看记录:







 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问