导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
273 播放
收藏
片段保存及分享
播放有问题?
请戳这里
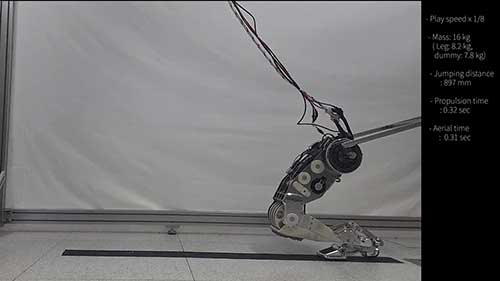
人形机器人腿
时长:3 分钟
类别:智能机器人技术
简介:Hyperleg是一款具有高度动态性的机器人腿,可进行各种复杂、精细的运动,如行走、短跑、跳跃或跳舞。
标签:
教学
智能机器人
机器人机械机构
相关视频:
逆向运动学1
这个视频介绍了逆运动学问题——推导出期望的末端执行器位置的所需要的关节位置构型。
酒店服务机器人
Botlr是一个处于测试阶段的酒店服务机器人。我们对它进行了严格测试,让它进行交付任务。这个小型机器人外观时尚,有赛车条纹,可以从Aloft酒店的前台将小物品送到客人的客房。
机器人控制应用概述
介绍了德国航空航天中心开发的扭矩控制人形机器人TORO的硬件和控制应用。
人工智能机器人
随着人工智能技术的不断发展,智能机器人也层出不穷,视频盘点了截至2019年,研发的功能最强大的智能机器人。
ROS架构解析01
所有基于ROS的机器人都是使用五个简单但核心的架构来进行编程,节点、参数、话题、服务、行动。在这个视频中,我们将介绍节点、参数和话题。
Angatec多功能消防机器人
AngatecTEC800是市场上最多功能的消防机器人。本片将展示这款消防机器人的功能。
何谓ROS消息
介绍ROS的几个重要话题通信以及消息命令,并旨在为ROS用户提供对各种概念的基础理解,了解不同项目的基础知识和应用。
人形机器人腿
Hyperleg是一款具有高度动态性的机器人腿,可进行各种复杂、精细的运动,如行走、短跑、跳跃或跳舞。
观看记录: