导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
187 播放
收藏
片段保存及分享
播放有问题?
请戳这里
ROS架构解析01
时长:13 分钟
类别:智能机器人技术
简介:所有基于ROS的机器人都是使用五个简单但核心的架构来进行编程,节点、参数、话题、服务、行动。在这个视频中,我们将介绍节点、参数和话题。
标签:
教学
智能机器人
机器人操作系统
相关视频:
行李运输机器人
人工智能是当今炙手可热的领域,其应用在医疗、刑侦、艺术等领域都被广泛应用。那么我们来看看人工智能在机场的应用。本视频展示了美国达拉斯市福特·伍斯机场机器人为国际航线旅客实施行李转运。
与水下机器人一起潜水
由斯坦福大学机器人实验室开发的OceanOneK可以在水下潜入1000米深处,同时保持人类的敏捷和灵巧。ClaireReilly与这款人形机器人一同下潜,对其进行了测试。
机器人建模
Gazebo是一款免费的机器人仿真软件,我们学习如何使用Gazebo模拟器以及ROS操作系统搭建机器人。
扭矩或力输入的运动控制2
这一集里,我将比较PD和PID控制对单个机器人关节在重力下运动的设定值控制,其中控制输入是一个力矩。
机器人双手共享控制系统
机器人双手共享控制系统是一种技术,允许一个操作员控制机器人的双臂,以便进行复杂的操作。这种系统通常用于工业机器人、医疗机器人或其他需要进行精细操作的场合。
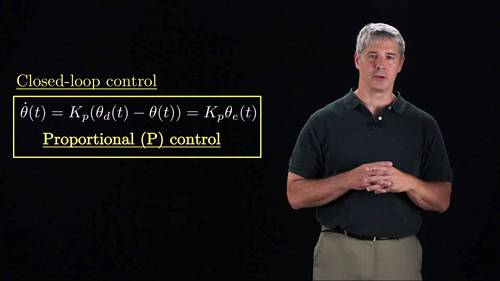
带速度输入的运动控制1
这个视频介绍了单自由度系统位置的比例(P)控制,其中控制输入是速度。
Ascento安保机器人
严重的劳动力短缺问题即将成为过去?瑞士新创公司Ascento推出了他们的最新力作——AscentoGuard安保机器人!这款超可爱的机器人不仅可以巡逻工厂,还能侦测入侵者。
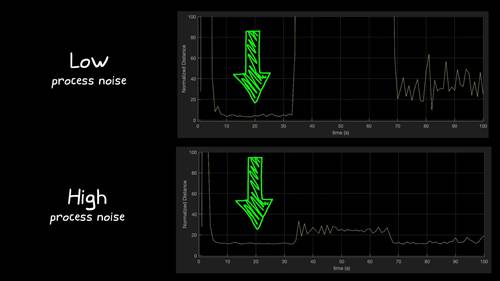
传感器融合与跟踪4
本视频解释了如何通过使用交互式多模型滤波器估计状态来改善跟踪单个对象。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问