导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
208 播放
收藏
片段保存及分享
播放有问题?
请戳这里
酒店服务机器人
时长:6 分钟
类别:智能机器人技术
简介:Botlr是一个处于测试阶段的酒店服务机器人。我们对它进行了严格测试,让它进行交付任务。这个小型机器人外观时尚,有赛车条纹,可以从Aloft酒店的前台将小物品送到客人的客房。
标签:
教学
智能机器人
服务机器人
相关视频:
如何创建ROS工作空间01
学习如何下载Ubuntu20.04ISO镜像并在虚拟机中安装。此外,你还将学习如何在VirtualBox中最大化屏幕时调整Ubuntu的显示。
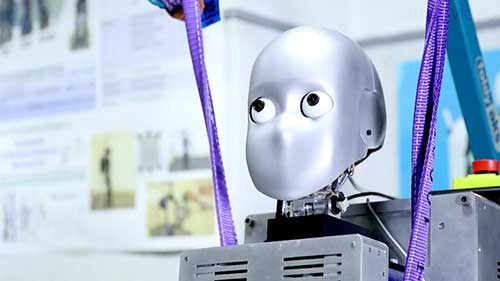
QT机器人
QT机器人是一种表情丰富、引人入胜的机器人,可作为工具帮助自闭症谱系障碍儿童学习。通过在治疗师、教师和孩子之间起到中介作用,QT机器人改善了儿童的参与和合作,增强了他们的学习机会。
ROS入门01:文件系统
ROS基本概念介绍,包括节点管理器、节点、话题、消息和服务通信以及文件系统。
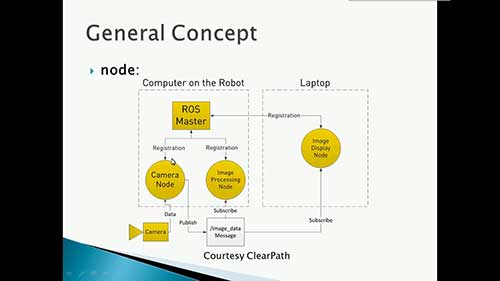
ROS架构
这个视频是关于ROS架构的。我们解释了数据的流动,我们将介绍节点以及它们之间的通信类型:话题、服务器和行动。
柔性机器人
有了我们的触觉传感器,夹持参数可以实时确定,并且可以动态地施加最佳夹持力。机器人通常不是柔软的,但是受章鱼启发,工程师正在创建能够扭曲解决刚性机器人无法处理的问题的机器人。
二阶误差动力学
本视频研究的是以二阶线性常微分方程来描述的误差动力学模型。
逆向运动学2
这个视频介绍了数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由一个最小坐标集合表示。
机器人的智能视觉系统
工业研究所研发出的只能视觉系统能使机器人解读自己所看到的视觉世界,根据视觉信息行动,并从经验中学习,并不断改进性能。
观看记录: