导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
234 播放
收藏
片段保存及分享
播放有问题?
请戳这里
柔性机器人
时长:5 分钟
类别:智能机器人技术
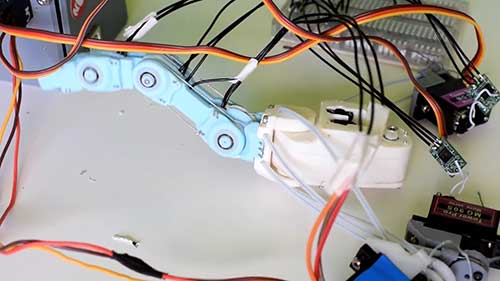
简介:有了我们的触觉传感器,夹持参数可以实时确定,并且可以动态地施加最佳夹持力。机器人通常不是柔软的,但是受章鱼启发,工程师正在创建能够扭曲解决刚性机器人无法处理的问题的机器人。
标签:
教学
智能机器人
机器人传感器
相关视频:
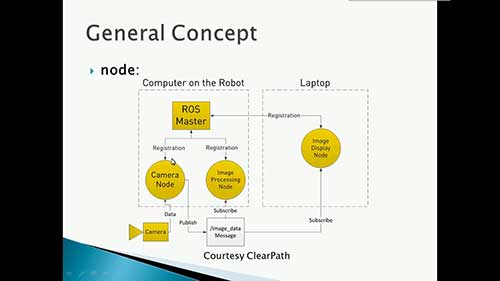
ROS入门01:文件系统
ROS基本概念介绍,包括节点管理器、节点、话题、消息和服务通信以及文件系统。
仿生机械手 03 仿生手指原型设计
使用FDM打印和Arduino,在Fusion 360中进行设计仿生手指原型,最后测试仿生手的三个连续关节。
5种最佳人工智能编程语言
人工智能将改变全球经济趋势,如果你想进行AI开发,那就先来了解这5种开发AI的最佳语言吧。
ROS入门02:ROS命令
介绍一些有用的ROS命令,例如:roscore、roscd、rosls、ros节点和ros话题。
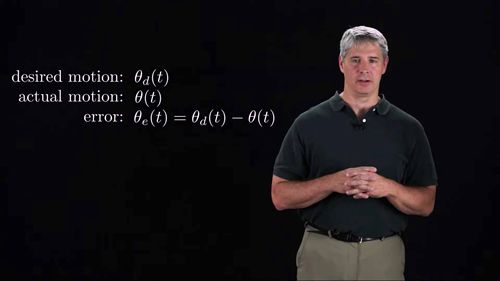
误差响应
在这一集中,我将介绍一个被控制系统的误差响应,并根据其稳态误差和瞬态响应来描述误差响应。
二阶误差动力学
本视频研究的是以二阶线性常微分方程来描述的误差动力学模型。
颠覆农业领域的机器人
农业机器人让农民得以从效率低,重复高和乏味的劳作中解放双手,使他们能够更加专注于提高整体产量。目前农业上一些最常见的机器人主要用于农产品收获和采摘以及杂草控制。
机器人在拥挤动态环境中的自主导航
本视频讲解的是一种新的路径规划算法,用于机器人在拥挤行人环境中导航。与许多其他的路径规划算法(假设与其他行人协作)不同,该算法是完全独立的。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问