导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
220 播放
收藏
片段保存及分享
播放有问题?
请戳这里
ROS入门02:ROS命令
时长:13 分钟
类别:智能机器人技术
简介:介绍一些有用的ROS命令,例如:roscore、roscd、rosls、ros节点和ros话题。
标签:
教学
智能机器人
机器人操作系统
相关视频:
机器人手术系统构成
机器人手术是由外科医生通过几个小切口(称为端口)操纵机器人手臂进行的微创手术。手术机器人由几个主要组件组成,包括控制台,有四个互动式机器人手臂和附有外科手术器械,以及高清晰度的3D视觉系统。
关于ROS的五个关键要素
我们介绍了开始使用ROS开发机器人之前需要了解的五个要素。
农业机器人的发展
农业自20世纪20年代首次引入机器人技术,农民已普遍使用GPS引导的播种机、喷雾器和联合收割机。但有一项工作对机器人来说一直非常困难:采摘浆果。本视频将向你介绍采摘草莓的农业机器人。
未来的创新型机器人
今天的节目中,我们来到了卡耐基梅隆大学,在那里我们将欣赏他们研制出的一系列最新奇的机器人,看看它们将如何帮助人类改善生活。
农业喷雾机器人
R150是一款专为在各种环境中进行高效喷雾作业而设计的农业和消毒喷雾机器人。其配备先进的厘米级精度RTK导航系统,该机器人能够完全自主运行,并提供完全手动控制。
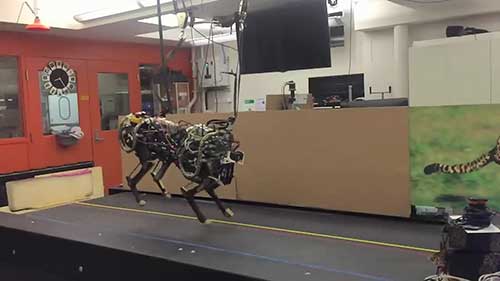
机器猎豹自主避障
在机器人的飞速发展过程中,麻省理工学院的研究人员训练了一只机器猎豹,使其能够在奔跑时看到并跳过障碍物。这使得这款四足机器人成为首个能够自主奔跑并跳过障碍物的机器人。
仿生蝙蝠机器人
一只倒挂房梁的蝙蝠可能会让你尖叫,但当你看到这只蝙蝠,你会有什么感觉呢?
农业机器人塑造农业未来
农业技术领域已经迎来了未来,农业机器人已经在农田中广泛应用,农业的各个方面都以某种方式实现了自动化。
观看记录:







 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问