导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
254 播放
收藏
片段保存及分享
播放有问题?
请戳这里
turtlesim功能包:控制乌龟转圈
时长:11 分钟
类别:智能机器人技术
简介:讲解turtlesim功能包,并演示如何控制乌龟转圈,以网格和方形路径运动。
标签:
教学
智能机器人
机器人操作系统
相关视频:
智能家用机器人
安娜是一个半人形机器人,大约130厘米高,70厘米宽。预计重量在50到70公斤之间,由位于哥本哈根的AnnaOneApS开发,安娜是一个智能家用机器人。
工作中的手术机器人
如今的手术机器人扩展了外科医生的能力;它们可以过滤手颤抖,并且允许进行即使是最优秀的外科医生也无法通过腹腔镜手术的典型长柄工具完成的操作。
机器人建模
Gazebo是一款免费的机器人仿真软件,我们学习如何使用Gazebo模拟器以及ROS操作系统搭建机器人。
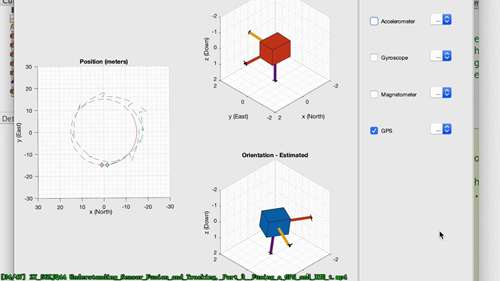
传感器融合与跟踪3
我将继续接着上一集的内容讨论使用传感器融合来定位的方法。
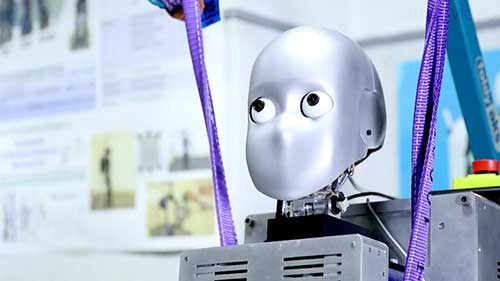
人工智能机器人
随着人工智能技术的不断发展,智能机器人也层出不穷,视频盘点了截至2019年,研发的功能最强大的智能机器人。
仿生雨燕机器人
超逼真的雨燕机器人,简约而不简单!它不仅可以自主飞行,还可以成群结队进行飞行表演!
救援机器人
救援机器人用于在不同类型的环境中进行搜索和救援行动。
柔性机器人
有了我们的触觉传感器,夹持参数可以实时确定,并且可以动态地施加最佳夹持力。机器人通常不是柔软的,但是受章鱼启发,工程师正在创建能够扭曲解决刚性机器人无法处理的问题的机器人。
观看记录: