导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1835 播放
收藏
片段保存及分享
播放有问题?
请戳这里
传感器融合与跟踪3
时长:14 分钟
类别:智能机器人技术
简介:我将继续接着上一集的内容讨论使用传感器融合来定位的方法。
标签:
教学
智能机器人技术
传感器融合
相关视频:
太空机器人
欧洲航天局机器人工程师马丁在节目中讨论了一些即将到来的涉及机器人的太空探索任务。
丰田家用机器人
田研究所(TRI)专注于研究辅助型家用机器人。TRI正在教一个通用机器人在真实的家庭中执行有用的人类级别的任务。
扭矩或力输入的运动控制2
这一集里,我将比较PD和PID控制对单个机器人关节在重力下运动的设定值控制,其中控制输入是一个力矩。
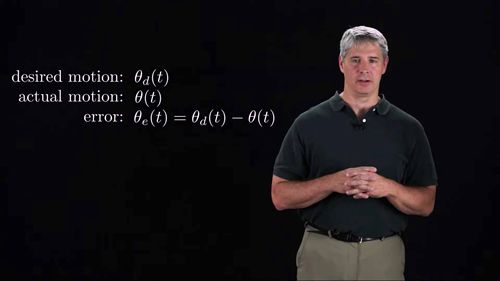
误差响应
在这一集中,我将介绍一个被控制系统的误差响应,并根据其稳态误差和瞬态响应来描述误差响应。
Bella服务机器人
BellaBot是一种机器人服务员,专门设计用于在餐厅、酒店和其他服务行业中为顾客提供服务。
Colossus消防机器人
Colossus是世界上最好的模块化消防机器人,拥有12多项专利的任务模块。Colossus是2019年4月在巴黎圣母院火灾中与巴黎消防队一起介入的机器人。
机器人是如何制造的
机器人已经广泛应用到了制造业当中。但现在,它们正在走进我们的日常生活。了解目前的技术是如何实现让机器人在生活的方方面面协助人类的吧,顺便看看机器人是如何制造出来的!
关于ROS的五个关键要素
我们介绍了开始使用ROS开发机器人之前需要了解的五个要素。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问