导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
192 播放
收藏
片段保存及分享
播放有问题?
请戳这里
关于ROS的五个关键要素
时长:9 分钟
类别:智能机器人技术
简介:我们介绍了开始使用ROS开发机器人之前需要了解的五个要素。
标签:
教学
智能机器人
机器人操作系统
相关视频:
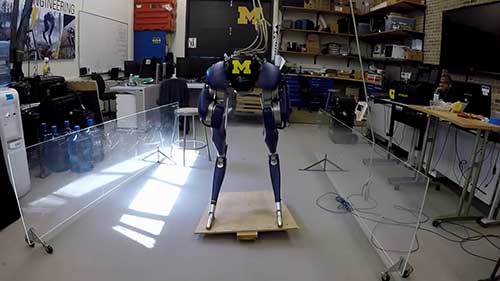
双足机器人的反馈控制
CassieBlue是一个双足机器人,它的反馈控制器是一种用于控制机器人动态步行的控制系统。这个控制器是由密歇根大学的研究团队开发的,旨在使CassieBlue能够在各种复杂的环境中实现稳定的步行。
盘点15种先进的农业机器人
农业机器人通常配备了各种传感器和智能控制系统,能够自主地感知和应对环境变化,从而提高生产效率、降低劳动成本。本片介绍了目前技术最先进的15种机器人。
LeoBots清洁机器人
LeoBots是一系列清洁机器人,由4种不同的型号组成。每台机器都被要求执行一项特定的任务,以便在其清洁操作中达到最高效率。
7种新型智能农业机器人
下一代农业机器人和自动化技术将颠覆农业的未来,解放农民的双手。
多足机器人马克思
由CSIRO公司开发的多足机器人马克思是一个超轻的六足机器人,它可在具有挑战性的室内和室外环境中进行探索工作。
农业喷雾机器人
R150是一款专为在各种环境中进行高效喷雾作业而设计的农业和消毒喷雾机器人。其配备先进的厘米级精度RTK导航系统,该机器人能够完全自主运行,并提供完全手动控制。
仿海扁虫机器人
你知道海扁虫是怎么游的吗?没关系,看看这个仿海扁虫机器鱼,你就知道了!
二阶误差动力学
本视频研究的是以二阶线性常微分方程来描述的误差动力学模型。
观看记录:







 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问