导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
201 播放
收藏
片段保存及分享
播放有问题?
请戳这里
双足机器人的反馈控制
时长:4 分钟
类别:智能机器人技术
简介:CassieBlue是一个双足机器人,它的反馈控制器是一种用于控制机器人动态步行的控制系统。这个控制器是由密歇根大学的研究团队开发的,旨在使CassieBlue能够在各种复杂的环境中实现稳定的步行。
标签:
教学
智能机器人
机器人控制
相关视频:
了解ROS主节点与话题
ROS中的主节点是什么?我们为什么需要一个主节点?ROS使用什么类型的通信来进行节点间的通信?
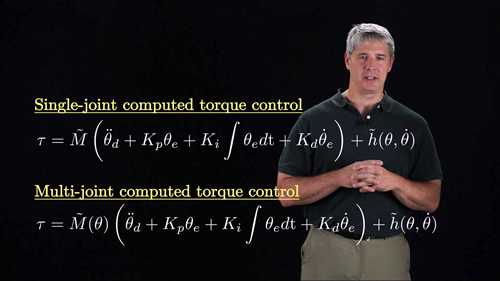
扭矩或力输入的运动控制3
该教程介绍了机器人计算力矩运动的控制方法,其中控制输入是力矩或力。
自动园艺修剪机器人
通过运行自动修剪机器人系统,可在葡萄树之间实现精确修剪。请查看我们在耕作、水果、蔬菜、乳制品、动物生产、水产养殖和新型食品领域的所有创新实验。
传感器融合与跟踪2
该视频介绍了如何使用磁力计,加速计和陀螺仪估算物体的方向。目的是展示这些传感器如何为解决方案做出贡献,并解释一些注意事项。
使用Gazebo模拟器搭建机器人
我们将学习如何在Gazebo模拟器中仅使用模型编辑器来构建和模拟一个简单的机器人。这个机器人将能够使用深度摄像头检测障碍物并向其移动。
带速度输入的运动控制3
这段短片介绍了机器人的任务空间运动控制,其中控制输入为关节速度,末端执行器的期望运动表示为SE(3)中的位形X。
工作中的手术机器人
如今的手术机器人扩展了外科医生的能力;它们可以过滤手颤抖,并且允许进行即使是最优秀的外科医生也无法通过腹腔镜手术的典型长柄工具完成的操作。
大自然的灵感馈赠:仿生机器人
自然界的动物们上天入地,各具本领。Festo公司以大自然为灵感,创造了各类仿生机器人的杰作!
观看记录: