导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1834 播放
收藏
片段保存及分享
播放有问题?
请戳这里
仿生机械手 04 CMC关节
时长:9 分钟
类别:智能机器人技术
简介:我们来看看CMC(腕掌)关节的生物力学、解剖学和运动学,以及它们如何与当代仿生手设计相联系。
标签:
教学
智能机器人技术
机械手
相关视频:
探索宇宙的太空机器人
在接下来的几分钟里,我们将带您参观一些最酷的太空机器人,机器人将成为未来宇宙的主要探险者。
自动园艺修剪机器人
通过运行自动修剪机器人系统,可在葡萄树之间实现精确修剪。请查看我们在耕作、水果、蔬菜、乳制品、动物生产、水产养殖和新型食品领域的所有创新实验。
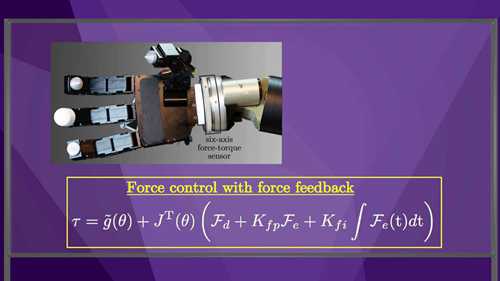
力控制
本教程描述了机器人基于雅可比矩阵转置的力控制,包括有和没有末端执行器力-力矩反馈。
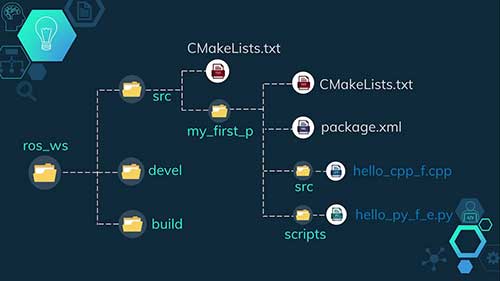
rosrun命令
rosrun命令用于在ROS中启动一个指定软件包中的节点。通过rosrun命令,我们可以指定软件包和节点的名称,以便在终端中启动这个节点。
触觉传感器工作原理
现成的夹具必须预先为每个要处理的独特物品编程,并且无法适应物体属性的变化,比如重量。而使用我们的触觉传感器,夹持参数可以实时确定,并且可以动态地施加最佳夹持力。
护理机器人
这是“RIBA-II”,一款可将病人从病床上抬起到轮椅上的护理机器人。
太空机器人的合作
多机器人合作是被视为行星探索中有前景的几项关键技术之一。在PRO-ACT项目中,这些技术得到了应用和进一步发展,这些机器人系统预计将共同执行任务。
了解Gazebo模拟器
Gazebo是一款3D动态模拟器,能够在复杂的室内和室外环境中准确有效地模拟机器人群,与游戏引擎提供高保真度的视觉模拟类似,设计机器人是其典型应用之一。
观看记录:







 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问