导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1967 播放
收藏
片段保存及分享
播放有问题?
请戳这里
传感器融合与跟踪6
时长:16 分钟
类别:智能机器人技术
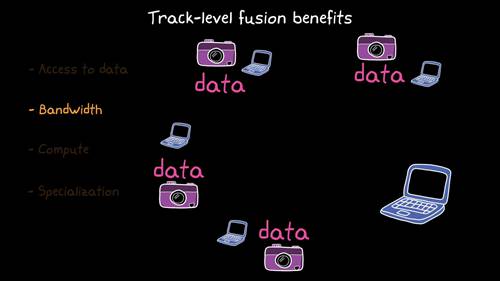
简介:您将在视频中看到两种不同的跟踪体系结构,并了解如何选用适合的跟踪体系结构。
标签:
教学
智能机器人技术
传感器融合
相关视频:
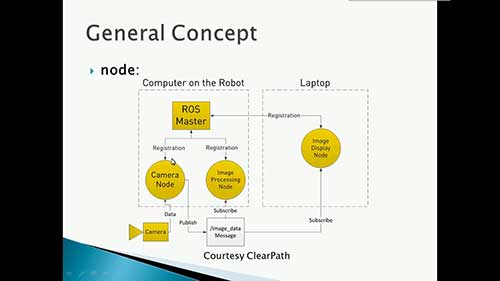
理解ROS节点与话题
节点是ROS软件包中的一个可执行文件。ROS节点使用ROS客户端库与其他节点通信。节点可以发布或订阅话题,也可以提供或使用服务。
机器人路径规划5
本视频介绍了路径规划的路线图算法:如果存在一条路径,那么采用这种算法就能保证会找到这条路径。然而,该算法往往只适用于简单的、低维的问题。在视频中给出的一个例子是平面多边形在多边形障碍间转换的路径规划。
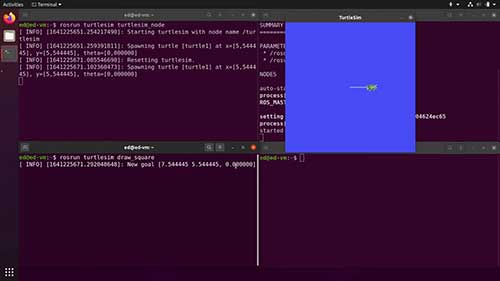
ROS入门01:文件系统
ROS基本概念介绍,包括节点管理器、节点、话题、消息和服务通信以及文件系统。
ROS基础
机器人的共同点是它们都可以通过ROS(机器人操作系统)进行控制。ROS是一种中间件和开源框架,专门用于机器人应用。你对ROS了解得越多,你就越容易编程和理解任何机器人的代码。
了解ROS服务通信
我们将在ROS中启动几个节点并对它们进行内省,以了解什么是ROS服务通信。
如何创建ROS工作空间02
学习如何在运行在虚拟机上的Ubuntu20.04上安装ROSNoetic。安装完成后,你将能够在终端上启动ROS环境。
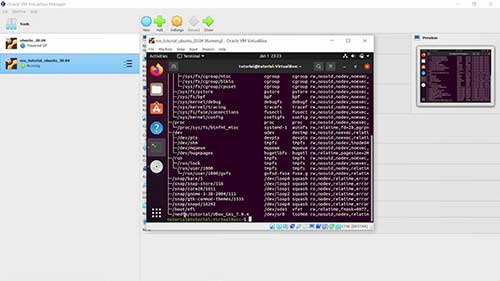
如何创建ROS工作空间01
学习如何下载Ubuntu20.04ISO镜像并在虚拟机中安装。此外,你还将学习如何在VirtualBox中最大化屏幕时调整Ubuntu的显示。
传感器融合与跟踪6
您将在视频中看到两种不同的跟踪体系结构,并了解如何选用适合的跟踪体系结构。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问