导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
253 播放
收藏
片段保存及分享
播放有问题?
请戳这里
机器猎豹自主避障
时长:2 分钟
类别:智能机器人技术
简介:在机器人的飞速发展过程中,麻省理工学院的研究人员训练了一只机器猎豹,使其能够在奔跑时看到并跳过障碍物。这使得这款四足机器人成为首个能够自主奔跑并跳过障碍物的机器人。
标签:
教学
智能机器人
仿生机器人
相关视频:
ROS基础
机器人的共同点是它们都可以通过ROS(机器人操作系统)进行控制。ROS是一种中间件和开源框架,专门用于机器人应用。你对ROS了解得越多,你就越容易编程和理解任何机器人的代码。
护理机器人
这是“RIBA-II”,一款可将病人从病床上抬起到轮椅上的护理机器人。
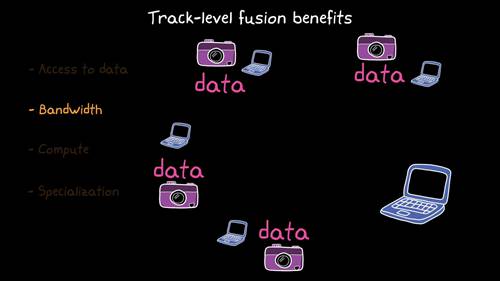
传感器融合与跟踪6
您将在视频中看到两种不同的跟踪体系结构,并了解如何选用适合的跟踪体系结构。
RoverS5安保机器人
ROVERS5机器人复合体是为沿人行道自主移动和无线传输内置视频摄像头拍摄的视频图像而设计的。这款安保机器人由带有电动驱动的轮式底盘、自动驾驶系统引导的以及独立视频监控系统组成。
使用Gazebo模拟器搭建机器人
我们将学习如何在Gazebo模拟器中仅使用模型编辑器来构建和模拟一个简单的机器人。这个机器人将能够使用深度摄像头检测障碍物并向其移动。
路虎HF消防机器人
路虎300HF是具有监控喷嘴的消防机器人。它的喷水距离可达110米,适用于炼油厂等大型火灾。
探索宇宙的太空机器人
在接下来的几分钟里,我们将带您参观一些最酷的太空机器人,机器人将成为未来宇宙的主要探险者。
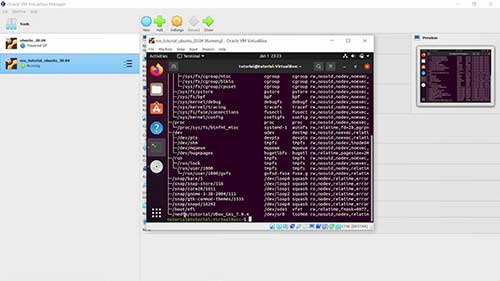
如何创建ROS工作空间01
学习如何下载Ubuntu20.04ISO镜像并在虚拟机中安装。此外,你还将学习如何在VirtualBox中最大化屏幕时调整Ubuntu的显示。
观看记录: