导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1723 播放
收藏
片段保存及分享
播放有问题?
请戳这里
机器人起源
时长:5 分钟
类别:智能机器人技术
简介:智能型机器人是人类最渴望能够早日制造出来的机器朋友。然而要制造出一台智能机器人并不容易,仅仅是让机器模拟人类的行走动作,科学家们就要付出了数十甚至上百年的努力。机器人到底是如何发明出来的呢?收看视频吧。
标签:
教学
智能机器人技术
机器人概论
相关视频:
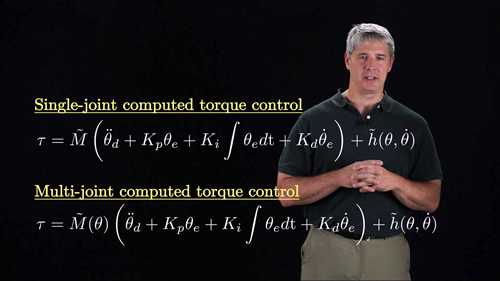
扭矩或力输入的运动控制3
该教程介绍了机器人计算力矩运动的控制方法,其中控制输入是力矩或力。
微创手术外科机器人
我们正在重新构想手术机器人技术,使其更少侵入性、更有能力,只需一个直径1.8厘米的小切口。我们的机器人最大限度地增大了腹部可视化范围。
手术机器人开启医疗新时代
医疗保健正在经历技术颠覆,因为机器人手术的进步正在帮助外科医生进行更少侵入性的手术。本片介绍了达芬奇机器人手术系统的优势。
酒店服务机器人
Botlr是一个处于测试阶段的酒店服务机器人。我们对它进行了严格测试,让它进行交付任务。这个小型机器人外观时尚,有赛车条纹,可以从Aloft酒店的前台将小物品送到客人的客房。
达芬奇手术机器人概述
达芬奇手术机器人是一种先进的外科手术系统,由IntuitiveSurgical公司开发。它采用了远程操作和机器辅助技术,为外科医生提供了更精确的操作平台。
智能家用机器人
安娜是一个半人形机器人,大约130厘米高,70厘米宽。预计重量在50到70公斤之间,由位于哥本哈根的AnnaOneApS开发,安娜是一个智能家用机器人。
路虎HF消防机器人
路虎300HF是具有监控喷嘴的消防机器人。它的喷水距离可达110米,适用于炼油厂等大型火灾。
机器人起源
智能型机器人是人类最渴望能够早日制造出来的机器朋友。然而要制造出一台智能机器人并不容易,仅仅是让机器模拟人类的行走动作,科学家们就要付出了数十甚至上百年的努力。机器人到底是如何发明出来的呢?收看视频吧。
观看记录:








 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问