导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
276 播放
收藏
片段保存及分享
播放有问题?
请戳这里
机器人手术系统构成
时长:3 分钟
类别:智能机器人技术
简介:机器人手术是由外科医生通过几个小切口(称为端口)操纵机器人手臂进行的微创手术。手术机器人由几个主要组件组成,包括控制台,有四个互动式机器人手臂和附有外科手术器械,以及高清晰度的3D视觉系统。
标签:
教学
智能机器人
手术机器人
相关视频:
Turtlesim功能包:控制乌龟运动
我们将把目前为止学到的所有知识整合起来,制作一个Turtlesim项目。你将学习如何编程Turtlesim,控制乌龟去到目标位置。
了解ROS主节点与话题
ROS中的主节点是什么?我们为什么需要一个主节点?ROS使用什么类型的通信来进行节点间的通信?
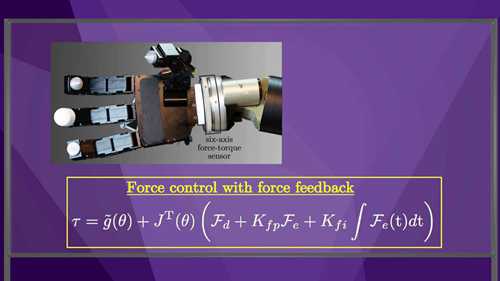
力控制
本教程描述了机器人基于雅可比矩阵转置的力控制,包括有和没有末端执行器力-力矩反馈。
QT机器人
QT机器人是一种表情丰富、引人入胜的机器人,可作为工具帮助自闭症谱系障碍儿童学习。通过在治疗师、教师和孩子之间起到中介作用,QT机器人改善了儿童的参与和合作,增强了他们的学习机会。
混合运动力控制
本视频介绍了混合运动力控制:控制机器人在无约束方向上产生期望的运动和在约束方向上产生期望的力。
路虎HF消防机器人
路虎300HF是具有监控喷嘴的消防机器人。它的喷水距离可达110米,适用于炼油厂等大型火灾。
通过脑机接口技术获得触觉
美国国防部高级研究计划局首次在人体上演示了一项前沿技术,即将机械臂与神经系统相连接,让个体从大脑中感知触觉。
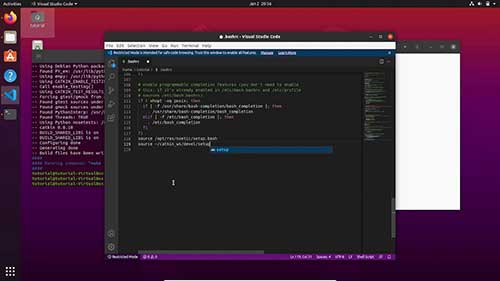
如何创建ROS工作空间03
学习如何在Ubuntu20.04上下载VisualStudioCode。然后,你将创建你的第一个ROS工作空间并启动环境。
观看记录:







 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问