导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1719 播放
收藏
片段保存及分享
播放有问题?
请戳这里
逆向运动学3
时长:5 分钟
类别:智能机器人技术
简介:这一集将延续上一集的内容,介绍数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由变换矩阵表示。
标签:
教学
智能机器人技术
逆向运动学
相关视频:
传感器融合与跟踪2
该视频介绍了如何使用磁力计,加速计和陀螺仪估算物体的方向。目的是展示这些传感器如何为解决方案做出贡献,并解释一些注意事项。
颠覆农业领域的机器人
农业机器人让农民得以从效率低,重复高和乏味的劳作中解放双手,使他们能够更加专注于提高整体产量。目前农业上一些最常见的机器人主要用于农产品收获和采摘以及杂草控制。
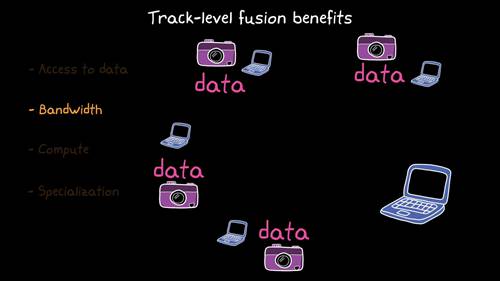
传感器融合与跟踪6
您将在视频中看到两种不同的跟踪体系结构,并了解如何选用适合的跟踪体系结构。
了解机器人电源
机器人要想动起来,需要多大电压,多大电流?我们将在视频中讲解机器人的电池组和电源。
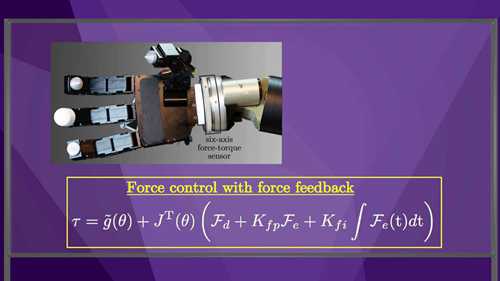
力控制
本教程描述了机器人基于雅可比矩阵转置的力控制,包括有和没有末端执行器力-力矩反馈。
机器人路径规划8
本集介绍的是基于路径规划的人工势场法,人工势场法是局部路径规划的一种比较常用的方法。这种方法假设机器人在一种虚拟力场下运动。
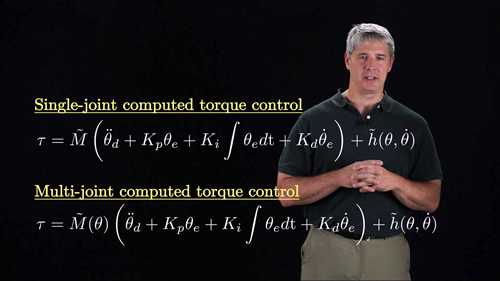
扭矩或力输入的运动控制3
该教程介绍了机器人计算力矩运动的控制方法,其中控制输入是力矩或力。
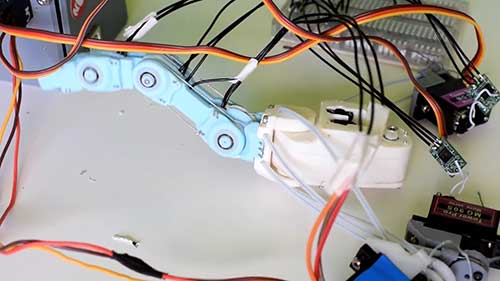
仿生机械手 03 仿生手指原型设计
使用FDM打印和Arduino,在Fusion 360中进行设计仿生手指原型,最后测试仿生手的三个连续关节。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问