导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1783 播放
收藏
片段保存及分享
播放有问题?
请戳这里
机器人路径规划8
时长:5 分钟
类别:智能机器人技术
简介:本集介绍的是基于路径规划的人工势场法,人工势场法是局部路径规划的一种比较常用的方法。这种方法假设机器人在一种虚拟力场下运动。
标签:
教学
智能机器人技术
路径规划技术
相关视频:
传感器融合与跟踪5
目标跟踪是利用各种类型的传感器获得的关于目标信息,对目标的真实状态以及未来的状态进行估计和预测的一门技术。这一集我们采用的是使用交互式多模型算法,来进行目标跟踪的方法。
清洁机器人工作原理
清洁机器人正在成为最受欢迎的新家用电器之一。与传统的吸尘器不同,该机器人可以在地面上导航并避开障碍物来清洁房间。
7种新型智能农业机器人
下一代农业机器人和自动化技术将颠覆农业的未来,解放农民的双手。
ROS架构
这个视频是关于ROS架构的。我们解释了数据的流动,我们将介绍节点以及它们之间的通信类型:话题、服务器和行动。
救援机器人
救援机器人用于在不同类型的环境中进行搜索和救援行动。
RoverS5安保机器人
ROVERS5机器人复合体是为沿人行道自主移动和无线传输内置视频摄像头拍摄的视频图像而设计的。这款安保机器人由带有电动驱动的轮式底盘、自动驾驶系统引导的以及独立视频监控系统组成。
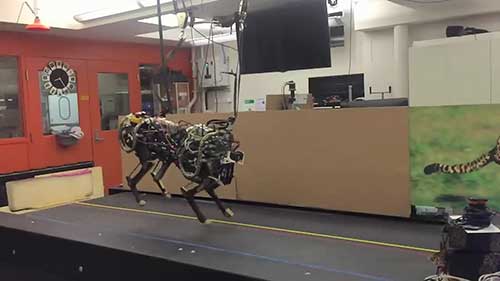
机器猎豹自主避障
在机器人的飞速发展过程中,麻省理工学院的研究人员训练了一只机器猎豹,使其能够在奔跑时看到并跳过障碍物。这使得这款四足机器人成为首个能够自主奔跑并跳过障碍物的机器人。
机器人双手共享控制系统
机器人双手共享控制系统是一种技术,允许一个操作员控制机器人的双臂,以便进行复杂的操作。这种系统通常用于工业机器人、医疗机器人或其他需要进行精细操作的场合。
观看记录:








 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问