导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
196 播放
收藏
片段保存及分享
播放有问题?
请戳这里
RoverS5安保机器人
时长:3 分钟
类别:智能机器人技术
简介:ROVERS5机器人复合体是为沿人行道自主移动和无线传输内置视频摄像头拍摄的视频图像而设计的。这款安保机器人由带有电动驱动的轮式底盘、自动驾驶系统引导的以及独立视频监控系统组成。
标签:
教学
智能机器人
安保机器人
相关视频:
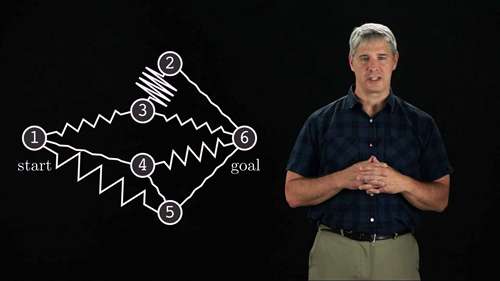
机器人路径规划4
A* 算法因为它的高效和准确而被广泛应用于路径发现和图遍历等任务上。这种算法是在图中寻找最优路径最流行和有效的方法之一。
机器人起源
智能型机器人是人类最渴望能够早日制造出来的机器朋友。然而要制造出一台智能机器人并不容易,仅仅是让机器模拟人类的行走动作,科学家们就要付出了数十甚至上百年的努力。机器人到底是如何发明出来的呢?收看视频吧。
脑机接合
埃隆·马斯克开创的Neuralink公司正在开辟一条通往人类数字化的道路,研究对象为“脑机接口”技术,利用电流让电脑和脑细胞“互动”。
多足机器人的步态和轨迹优化
本视频介绍了一种基于能耗最优的多足机器人综合步态优化方法,将步态优化过程转换为两个嵌套的子优化问题。
多足机器人马克思
由CSIRO公司开发的多足机器人马克思是一个超轻的六足机器人,它可在具有挑战性的室内和室外环境中进行探索工作。
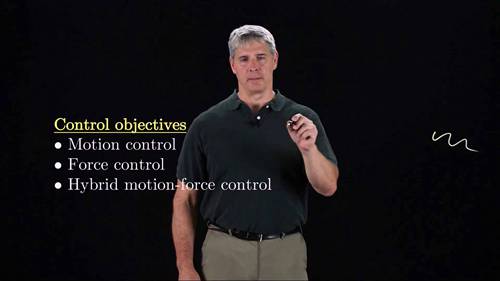
控制系统概述
机器人控制方法多种多样,本视频概述了运动(或位置)控制、力控制、混合运动力控制和阻抗控制等。
农业机器人的发展
农业自20世纪20年代首次引入机器人技术,农民已普遍使用GPS引导的播种机、喷雾器和联合收割机。但有一项工作对机器人来说一直非常困难:采摘浆果。本视频将向你介绍采摘草莓的农业机器人。
关于ROS的10大重点
ROS是一个机器人软件平台,它能为异质计算机集群提供类似操作系统的功能。我们介绍了ROS的10个重要知识点。
观看记录: