导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
251 播放
收藏
片段保存及分享
播放有问题?
请戳这里
Aquanaut水下机器人
时长:11 分钟
类别:智能机器人技术
简介:Aquanaut,由休斯顿机械公司开发,可以将自己从设计用于长途巡航的灵活潜艇转变为能够执行复杂操作任务的半人形机器人。
标签:
教学
智能机器人
水下机器人
相关视频:
Angatec多功能消防机器人
AngatecTEC800是市场上最多功能的消防机器人。本片将展示这款消防机器人的功能。
正向运动学2
我将在视频中介绍开链机器人正运动学中,以末端执行器坐标系表示的指数积公式。
仿生雨燕机器人
超逼真的雨燕机器人,简约而不简单!它不仅可以自主飞行,还可以成群结队进行飞行表演!
了解机器人电源
机器人要想动起来,需要多大电压,多大电流?我们将在视频中讲解机器人的电池组和电源。
O-R3户外安保机器人
O-R3是OTSAW的户外安保机器人,现在推出人脸识别技术!通过将自动驾驶和人工智能技术与出色的数据收集和分析能力相结合,O-R3为您的安全团队提供创新和关键的支持,以预防和打击犯罪。?
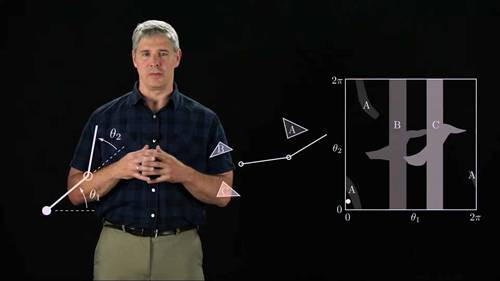
机器人路径规划2
本视频介绍了机器人c空间障碍、自由构型空间、碰撞检测的概念。
ROS入门02:ROS命令
介绍一些有用的ROS命令,例如:roscore、roscd、rosls、ros节点和ros话题。
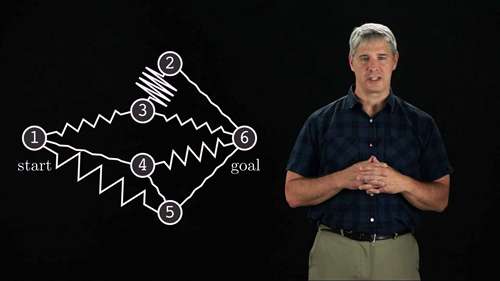
机器人路径规划4
A* 算法因为它的高效和准确而被广泛应用于路径发现和图遍历等任务上。这种算法是在图中寻找最优路径最流行和有效的方法之一。
观看记录: