导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1947 播放
收藏
片段保存及分享
播放有问题?
请戳这里
机器人路径规划2
时长:5 分钟
类别:智能机器人技术
简介:本视频介绍了机器人c空间障碍、自由构型空间、碰撞检测的概念。
标签:
教学
智能机器人技术
路径规划技术
相关视频:
机器人的智能视觉系统
工业研究所研发出的只能视觉系统能使机器人解读自己所看到的视觉世界,根据视觉信息行动,并从经验中学习,并不断改进性能。
仿海扁虫机器人
你知道海扁虫是怎么游的吗?没关系,看看这个仿海扁虫机器鱼,你就知道了!
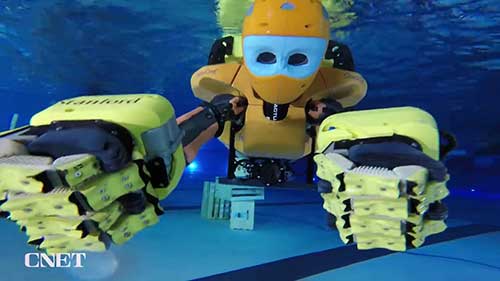
与水下机器人一起潜水
由斯坦福大学机器人实验室开发的OceanOneK可以在水下潜入1000米深处,同时保持人类的敏捷和灵巧。ClaireReilly与这款人形机器人一同下潜,对其进行了测试。
机器人混动传动系统
这是一种新型的液压传动方式,采用混合的气液配置,使用N根液压管和1根气动管线来实现具有N个自由度的机器人传动系统。通过触觉传感器,夹持参数可以实时确定,并且可以动态地施加最佳夹持力。
达芬奇手术机器人概述
达芬奇手术机器人是一种先进的外科手术系统,由IntuitiveSurgical公司开发。它采用了远程操作和机器辅助技术,为外科医生提供了更精确的操作平台。
研发新型仿生机器人
哈佛大学Wyss仿生工程研究所的仿生机器人平台通过研究大自然来获取灵感,以开发比传统机器人更智能、更柔软、更安全的新型机器人。
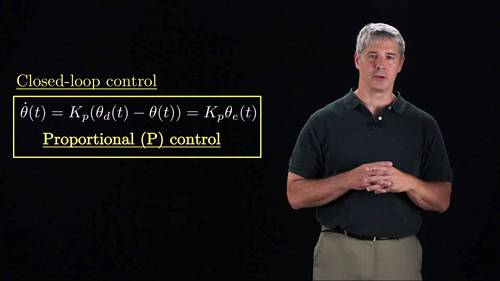
带速度输入的运动控制1
这个视频介绍了单自由度系统位置的比例(P)控制,其中控制输入是速度。
仿生机械手 04 CMC关节
我们来看看CMC(腕掌)关节的生物力学、解剖学和运动学,以及它们如何与当代仿生手设计相联系。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问