导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
220 播放
收藏
片段保存及分享
播放有问题?
请戳这里
ROS架构解析02
时长:13 分钟
类别:智能机器人技术
简介:ROS中每个程序包是一个节点,ROS中有四种通信方式:参数、话题、服务、行动。本集我们将介绍服务和行动。
标签:
教学
智能机器人
机器人操作系统
相关视频:
农业机器人的未来
农业机器人的出现确实为农业带来了很多好处。从草莓采摘机器人和稻田机器鸭,到运行水培垂直农场的机器人。这些机器人都使农场运作更加高效。
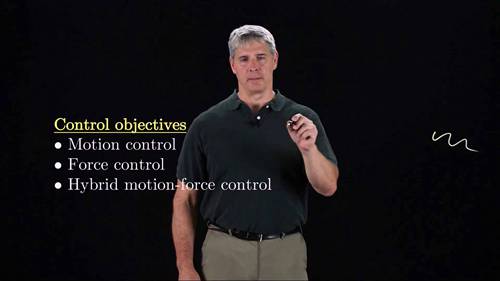
控制系统概述
机器人控制方法多种多样,本视频概述了运动(或位置)控制、力控制、混合运动力控制和阻抗控制等。
未来的智能机器人
机器人的发展史犹如人类的文明和进化史在不断地向着更高级发展。目前为止,智能机器人技术取得了哪些发展?是否真的马上就会像科幻片中的那样取代人类了呢?
机器人路径规划6
这一集介绍的是用于机器人路径规划的网格算法,其中自由c空间可以使用标准图进行搜索的正则网格表示,为了提高效率,也可以使用多分辨率网格。
逆向运动学1
这个视频介绍了逆运动学问题——推导出期望的末端执行器位置的所需要的关节位置构型。
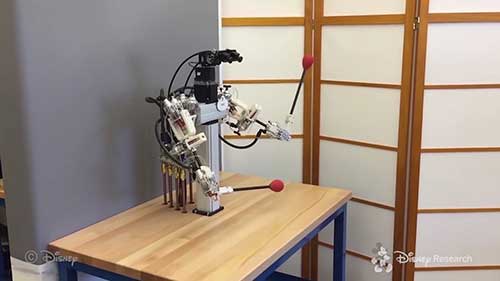
机器人混动传动系统
这是一种新型的液压传动方式,采用混合的气液配置,使用N根液压管和1根气动管线来实现具有N个自由度的机器人传动系统。通过触觉传感器,夹持参数可以实时确定,并且可以动态地施加最佳夹持力。
达芬奇手术机器人概述
达芬奇手术机器人是一种先进的外科手术系统,由IntuitiveSurgical公司开发。它采用了远程操作和机器辅助技术,为外科医生提供了更精确的操作平台。
仿生蝙蝠机器人
一只倒挂房梁的蝙蝠可能会让你尖叫,但当你看到这只蝙蝠,你会有什么感觉呢?
观看记录:







 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问