导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
186 播放
收藏
片段保存及分享
播放有问题?
请戳这里
农业机器人的未来
时长:9 分钟
类别:智能机器人技术
简介:农业机器人的出现确实为农业带来了很多好处。从草莓采摘机器人和稻田机器鸭,到运行水培垂直农场的机器人。这些机器人都使农场运作更加高效。
标签:
教学
智能机器人
农业机器人
相关视频:
未来的太空机器人
机器人在我们日常操作中变得越来越重要,有些机器人的设计灵感来自真实的动物,有些机器人在危险环境中执行任务,比如在太空中。同时,科学家们正在创造全新的机器人以各种方式协助未来的太空任务。
ROS架构
这个视频是关于ROS架构的。我们解释了数据的流动,我们将介绍节点以及它们之间的通信类型:话题、服务器和行动。
正向运动学3
我将在视频中演示指数积正运动学在RRRP机器人手臂上的应用。
机器人在拥挤动态环境中的自主导航
本视频讲解的是一种新的路径规划算法,用于机器人在拥挤行人环境中导航。与许多其他的路径规划算法(假设与其他行人协作)不同,该算法是完全独立的。
微创手术外科机器人
我们正在重新构想手术机器人技术,使其更少侵入性、更有能力,只需一个直径1.8厘米的小切口。我们的机器人最大限度地增大了腹部可视化范围。
阿西莫机器人发展史
阿西莫是一种智能机器人,由日本本田公司于1986年开始研制,那么在这40多年的时间里,这款类人机器人取得了怎样的进展呢?我们将为你回顾阿西莫的发展史。
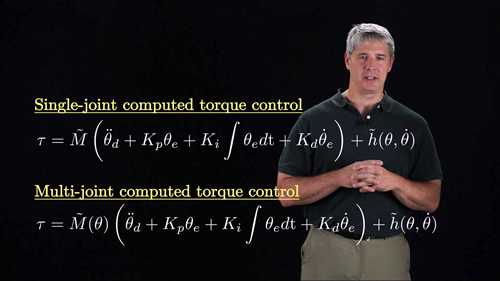
扭矩或力输入的运动控制3
该教程介绍了机器人计算力矩运动的控制方法,其中控制输入是力矩或力。
机器人路径规划3
这一集机器人路径规划教程主要介绍了机器人C空间图表算法的无向图、有向图、加权图、非加权图,以及树型图。
观看记录:








 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问