导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1703 播放
收藏
片段保存及分享
播放有问题?
请戳这里
机器人在拥挤动态环境中的自主导航
时长:13 分钟
类别:智能机器人技术
简介:本视频讲解的是一种新的路径规划算法,用于机器人在拥挤行人环境中导航。与许多其他的路径规划算法(假设与其他行人协作)不同,该算法是完全独立的。
标签:
教学
智能机器人技术
导航技术
相关视频:
机器人路径规划7
PRM是一种基于图搜索的方法,它将连续空间转换成离散空间,再利用A*等搜索算法在路线图上寻找路径,以提高搜索效率。
LeoBots清洁机器人
LeoBots是一系列清洁机器人,由4种不同的型号组成。每台机器都被要求执行一项特定的任务,以便在其清洁操作中达到最高效率。
带速度输入的运动控制2
本视频介绍了单自由度系统位置的比例积分(PI)控制,以及前馈加反馈PI控制。
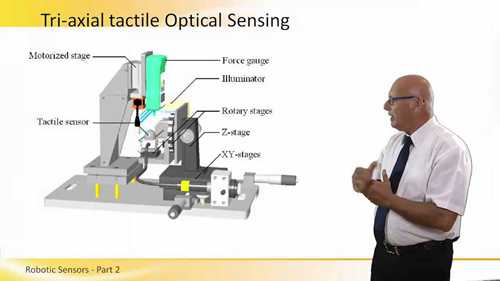
机器人用传感器2
在该教程的第一部分中,我们学习了常用的机器人传感器,那么在这一集里我们将学习一些较特殊的传感器,如,扫描传感器,旋转传感器,障碍物探测器,红外温度传感器,极化传感器等。
OTSAW安保机器人
OTSAW的户外安全和监控机器人。Aquanaut由休斯顿机械公司开发,可以将自己从设计用于长途巡航的灵活潜艇转变为能够执行复杂操作任务的半人形机器人。
机器人路径规划8
本集介绍的是基于路径规划的人工势场法,人工势场法是局部路径规划的一种比较常用的方法。这种方法假设机器人在一种虚拟力场下运动。
行李运输机器人
人工智能是当今炙手可热的领域,其应用在医疗、刑侦、艺术等领域都被广泛应用。那么我们来看看人工智能在机场的应用。本视频展示了美国达拉斯市福特·伍斯机场机器人为国际航线旅客实施行李转运。
通过脑机接口技术获得触觉
美国国防部高级研究计划局首次在人体上演示了一项前沿技术,即将机械臂与神经系统相连接,让个体从大脑中感知触觉。
观看记录:








 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问