导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
181 播放
收藏
片段保存及分享
播放有问题?
请戳这里
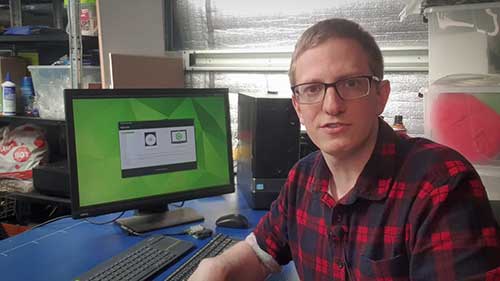
OTSAW安保机器人
时长:2 分钟
类别:智能机器人技术
简介:OTSAW的户外安全和监控机器人。Aquanaut由休斯顿机械公司开发,可以将自己从设计用于长途巡航的灵活潜艇转变为能够执行复杂操作任务的半人形机器人。
标签:
教学
智能机器人
安保机器人
相关视频:
了解ROS节点
节点是ROS中最重要的概念之一。每个ROS运行实例被称为节点。我们将从终端启动几个节点,以了解什么是ROS节点。
人工智能机器人
随着人工智能技术的不断发展,智能机器人也层出不穷,视频盘点了截至2019年,研发的功能最强大的智能机器人。
研发新型仿生机器人
哈佛大学Wyss仿生工程研究所的仿生机器人平台通过研究大自然来获取灵感,以开发比传统机器人更智能、更柔软、更安全的新型机器人。
触觉传感器工作原理
现成的夹具必须预先为每个要处理的独特物品编程,并且无法适应物体属性的变化,比如重量。而使用我们的触觉传感器,夹持参数可以实时确定,并且可以动态地施加最佳夹持力。
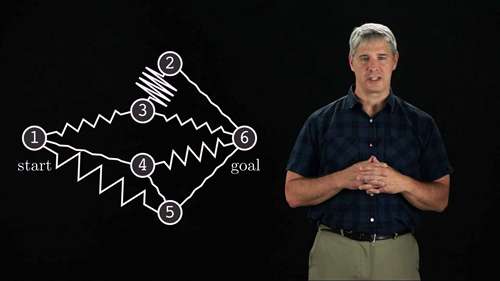
机器人路径规划4
A* 算法因为它的高效和准确而被广泛应用于路径发现和图遍历等任务上。这种算法是在图中寻找最优路径最流行和有效的方法之一。
5种最佳人工智能编程语言
人工智能将改变全球经济趋势,如果你想进行AI开发,那就先来了解这5种开发AI的最佳语言吧。
关于ROS的五个关键要素
我们介绍了开始使用ROS开发机器人之前需要了解的五个要素。
ROS例程:控制乌龟左右旋转
学习如何快速开始使用turtlebot模拟器及其控制。控制乌龟向左右旋转。
观看记录: