导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
263 播放
收藏
片段保存及分享
播放有问题?
请戳这里
拆弹机器人
时长:5 分钟
类别:智能机器人技术
简介:全球范围内有超过1亿颗未爆炸的炸弹。这些机器人可远程处理这些炸弹。
标签:
教学
智能机器人
拆弹机器人
相关视频:
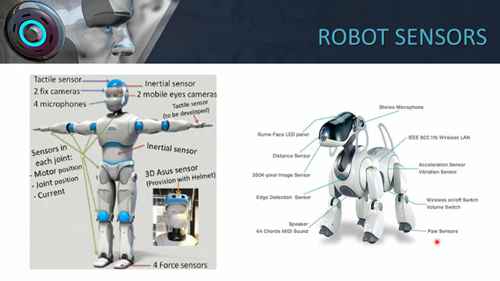
机器人传感器技术
本教程介绍了机器人用于了解环境、避开障碍物和检测物体的传感器。
使用Gazebo模拟器搭建机器人
我们将学习如何在Gazebo模拟器中仅使用模型编辑器来构建和模拟一个简单的机器人。这个机器人将能够使用深度摄像头检测障碍物并向其移动。
7种新型智能农业机器人
下一代农业机器人和自动化技术将颠覆农业的未来,解放农民的双手。
机器人双手共享控制系统
机器人双手共享控制系统是一种技术,允许一个操作员控制机器人的双臂,以便进行复杂的操作。这种系统通常用于工业机器人、医疗机器人或其他需要进行精细操作的场合。
盘点15种先进的农业机器人
农业机器人通常配备了各种传感器和智能控制系统,能够自主地感知和应对环境变化,从而提高生产效率、降低劳动成本。本片介绍了目前技术最先进的15种机器人。
扭矩或力输入的运动控制2
这一集里,我将比较PD和PID控制对单个机器人关节在重力下运动的设定值控制,其中控制输入是一个力矩。
逆向运动学2
这个视频介绍了数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由一个最小坐标集合表示。
使用触觉手套控制机器人
我们亲身体验了HaptX触觉手套与ShadowRobotCompany的极为灵巧的远程操作机器人的集成。使用这些VR手柄,我们不仅能够操纵像魔方这样复杂的物体,还可以以自然而直观的方式感受我们抓握的物体!
观看记录:








 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问