导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
238 播放
收藏
片段保存及分享
播放有问题?
请戳这里
人形机器人:阿波罗
时长:4 分钟
类别:智能机器人技术
简介:美国人形机器人开发公司Apptronik公布了一款新型机器人阿波罗,阿波罗可以像人类一样移动、弯曲手臂和抓握物体。
标签:
教学
智能机器人
太空机器人
相关视频:
正向运动学2
我将在视频中介绍开链机器人正运动学中,以末端执行器坐标系表示的指数积公式。
扭矩或力输入的运动控制1
本视频介绍了针对单个机器人关节的比例积分导数(PID)控制。
Turtlesim功能包:控制乌龟运动
我们将把目前为止学到的所有知识整合起来,制作一个Turtlesim项目。你将学习如何编程Turtlesim,控制乌龟去到目标位置。
5种最佳人工智能编程语言
人工智能将改变全球经济趋势,如果你想进行AI开发,那就先来了解这5种开发AI的最佳语言吧。
正向运动学3
我将在视频中演示指数积正运动学在RRRP机器人手臂上的应用。
太空机器人的合作
多机器人合作是被视为行星探索中有前景的几项关键技术之一。在PRO-ACT项目中,这些技术得到了应用和进一步发展,这些机器人系统预计将共同执行任务。
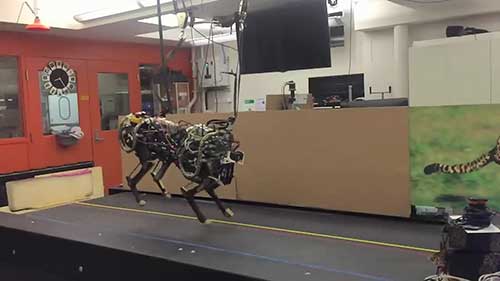
机器猎豹自主避障
在机器人的飞速发展过程中,麻省理工学院的研究人员训练了一只机器猎豹,使其能够在奔跑时看到并跳过障碍物。这使得这款四足机器人成为首个能够自主奔跑并跳过障碍物的机器人。
仿生机器人
飯田史也的研究探讨了如何通过从自然中汲取灵感来改进机器人技术,飯田的实验室里有各种跳跃机器人,可能受到蚱蜢、人类甚至恐龙的启发。
观看记录:








 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问