导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
212 播放
收藏
片段保存及分享
播放有问题?
请戳这里
在IRC5控制器上创建例行程序
时长:4 分钟
类别:工业机器人技术
简介:演示了如何在ABBIRC5控制器上创建新的例行程序的过程。
标签:
教学
工业机器人
工业机器人控制器
相关视频:
神经网络机器人3在Arduino软件上运行神经网络
这是该系列视频的最后一集,西恩将探讨使用光敏电阻让机器人导航的不同方法,以及神经网络是如何进行导航运作的。在本系列结束时,您将能够使用提供的资源创建自己的神经网络机器人。
饮料瓶自动化生产线
FANUC开发了一款自动化饮料瓶输送系统,利用6个M-710iC/50H机器人将饮料瓶从运货板上移除,并将其放到传送带上。
工业机器人建模2
学习如何深入了解机器人的相关参数,以确保在RoboDK软件中建模的机器人与真实的机器人保持一致。
川崎机器人维护服务
川崎机器人基于条件的维护(CBM)是一种积极的维护方法,它依赖于监测机器人及其组件的实际状态,以确定何时进行维护。
Fanuc机器人校准
我们将逐步介绍如何对由R30iB控制器控制的FanucM20iA机器人进行单位置校准和零点校准。
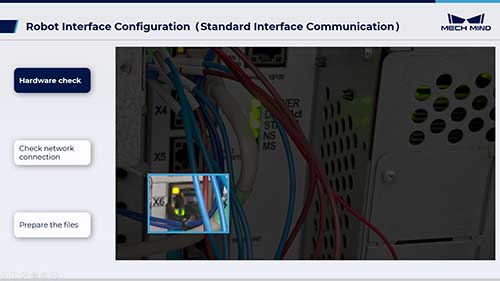
ABB机器人标准接口通信配置
本教程讲解了将程序文件加载到各种机器人中并使用不同的通信模式与机器人建立通信所需的操作步骤。这个视频演示了如何将程序文件加载到ABB机器人中,以建立机器人与Mech-Mind视觉系统之间的连接。
模糊逻辑介绍
这个视频介绍了模糊逻辑,包括模糊集合的基础,模糊规则,以及这些如何在决策中结合使用模糊逻辑。
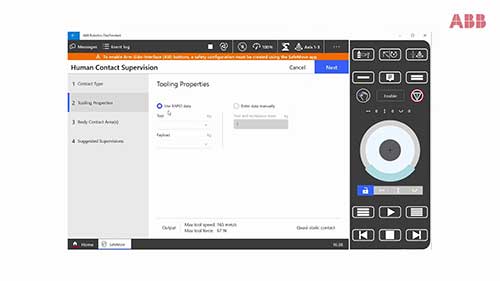
配置SafeMove安全系统3
在工业机器人和自动化系统中,配置SafeMove是指对其安全功能进行设置和调整。这一集中将讲解如何配置人体接触监控,这是指在机器人工作时监测和监控人与机器人之间的接触情况,以确保工作过程中人员的安全。
观看记录:




 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问