导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
267 播放
收藏
片段保存及分享
播放有问题?
请戳这里
机器人管件搬运系统
时长:6 分钟
类别:工业机器人技术
简介:KUKA合作伙伴ARCSpecialties开发并集成了这个机器人管件搬运系统。这个机器人系统降低了金属管件的搬运成本并增加了产出。
标签:
教学
工业机器人
工业机器人应用
相关视频:
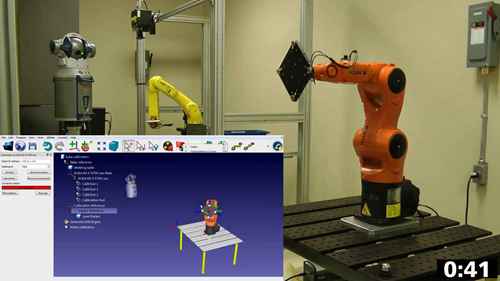
工业机器人校准
机器人校准是一个鉴定工业机器人运动学结构中的真实几何参数的过程。本节目演示了RoboDK分别通过Faro机器人跟踪仪与Creaform的C-Track双目相机测量仪实现机器人校准的过程。
机器人焊接技术
DesignPro是一家领先的公司,专注于开发和推广先进的机器人焊接技术。他们的焊接解决方案利用最新的自动化和机器人技术,为客户提供高效、精确和可靠的焊接解决方案。
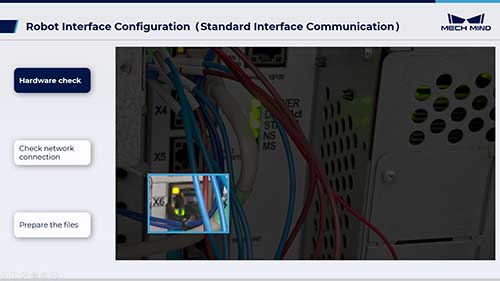
ABB机器人标准接口通信配置
本教程讲解了将程序文件加载到各种机器人中并使用不同的通信模式与机器人建立通信所需的操作步骤。这个视频演示了如何将程序文件加载到ABB机器人中,以建立机器人与Mech-Mind视觉系统之间的连接。
机器人的类型
工业机器人广泛应用于制造业,尤以汽车制造业最为常见。本视频介绍了不同种类的工业机器人。
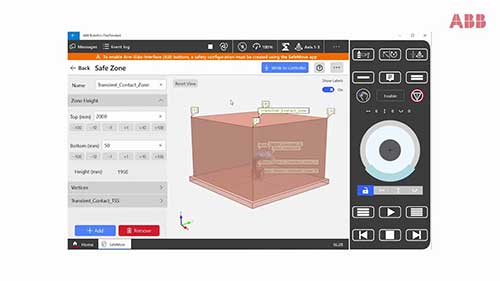
配置SafeMove安全系统2
了解更多关于SafeMove协作应用中的安全区域的知识。
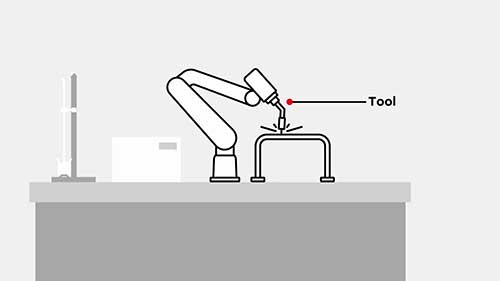
如何设置工具中心点
学习如何为SWIFTI、CRB1100和CRB1300机器人系统设置工具坐标系的原点,即工具中心点。
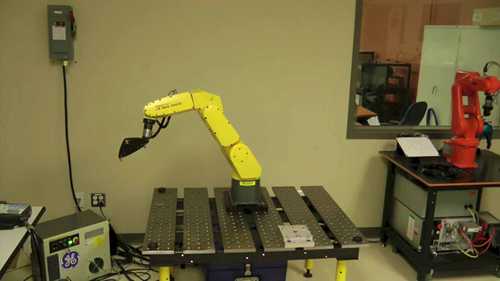
工业机器人的校准和精度验证
发那科LR Mate 200iC是一款多功能6轴小型机器人,常用于搬运上下料。为了保持机器人的绝对精度,必须进行校准,这里介绍了校准发那科LR Mate 200iC工业机器人的两种方法。
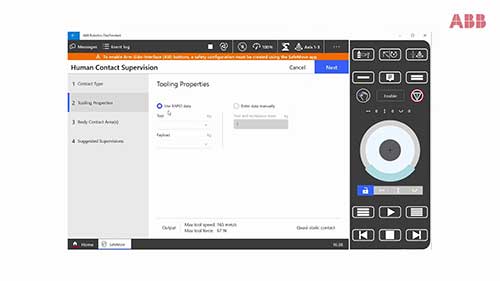
配置SafeMove安全系统3
在工业机器人和自动化系统中,配置SafeMove是指对其安全功能进行设置和调整。这一集中将讲解如何配置人体接触监控,这是指在机器人工作时监测和监控人与机器人之间的接触情况,以确保工作过程中人员的安全。
观看记录:


 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问