导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
267 播放
收藏
片段保存及分享
播放有问题?
请戳这里
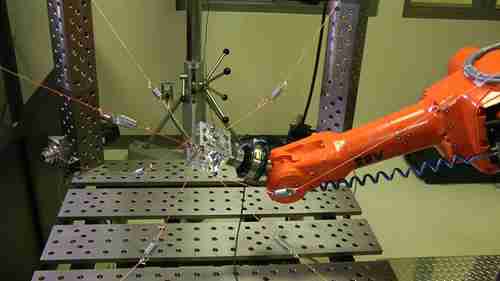
FANUC机器人的日常维护
时长:4 分钟
类别:工业机器人技术
简介:Acieta的服务工程师讲解了如何对FANUC机器人进行日常快速检查。
标签:
教学
工业机器人
工业机器人维护
相关视频:
工业机器人的校准
CabOLS用于对工业机器人的末端执行器施加各种负载。这里将演示使用CabOLS电缆机器人和激光跟踪仪对工业机器人进行校准。
AGV和机器人码垛系统
AGV是自动导引运输车的意思。GV是装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。码垛机器人能适应于纸箱、袋装、罐装、箱体、瓶装等各种形状的包装成品码垛作业,本视频重点讨论了AGV和机器人码垛系统。
机器人概论
机器人通常被认为是未来的一种技术,但它们已经出现在了我们的工作场所、家里、甚至餐馆里,很快也会出现在道路上。我们有必要多了解一下它们,本段视频将讨论机器人的发展,以及一些常见的控制设计。
工业机器人的起源
工业机器人的发展给我们带来了很多的变化,那么大家知道工业机器人的发展和起源吗?今天天机就来和大家一起来了解一下工业机器人的起源和发展。
人工智能速成课程 14人机合作
今天我们将集中讨论人类和人工智能合作的好处。我们人类能够利用人类的创造力和洞察力,而机器能执行繁复的劳动任务,综合大量信息,人工智能开发团队能很好地结合这些优势,来弥补人类和机器的弱点。这种合作可以帮助我们做出更好的决策。
机器人弧焊离线编程
了解如何为Panasonic机器人进行弧焊离线编程。步骤1:使用适配器放置组件;步骤2:选择工具和基础框架;步骤3:创建Panasonic机器人焊接操作;步骤4:调整外部轴的位置。
工业机器人编程软件——PowerMILL Robot
英国Delcam公司的罗宾·史密斯介绍了PowerMILL机器人编程软件,并演示了如何使用该软件,编写机器人雕刻石料的程序。
10种军用机器人
世界各国的军队正在加速研制军用机器人,以解决各种不同的复杂问题。有的机器人可以摧毁敌人的军队,有多可以排雷,以及执行其他重要任务。今天,我们将向您展示世界上最优秀的10款军事机器人!
观看记录:








 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问