导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
213 播放
收藏
片段保存及分享
播放有问题?
请戳这里
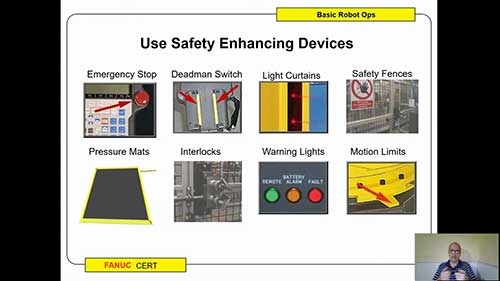
PEMA焊接机器人工作站
时长:2 分钟
类别:工业机器人技术
简介:PEMA机器人焊接解决方案旨在满足重型设备行业的最高需求。PEMARWS自适应焊接机器人工作站提高了效率、生产灵活性和焊接质量。
标签:
教学
工业机器人
工业机器人应用
相关视频:
FANUC电弧焊机器人
发那科提供了工业机器人领域最全面的产品线,使制造商能够利用FANUC各应用领域的机器人,形成自动化解决方案,帮助提高质量和生产效率。这段视频展示了利用FANUC机器人进行电弧焊的可能性。
FANUC机器人的功能和维护
了解如何进行工业机器人日常维护,以保持FANUCR1000iA机器人处于最佳状态。FANUCR1000系列机器人的应用包括托盘处理、物料搬运和点焊。
FANUC机器人工作原理
你能听懂关于机器人的一些专业术语吗?本片以FANUC机器人为例,来解释机器人的工作原理,重点放在机器人术语的解析上。
在机械臂上应用运动控制系统 01
RS开发了一种基于Industrial Shields开源PLC的运动控制系统,并将其应用于工作台机械臂。
多线机器人码垛系统
这条多线机器人码垛系统包括四条生产线,由三个发那科码垛机器人在两个独立的机器人单元中进行码垛。
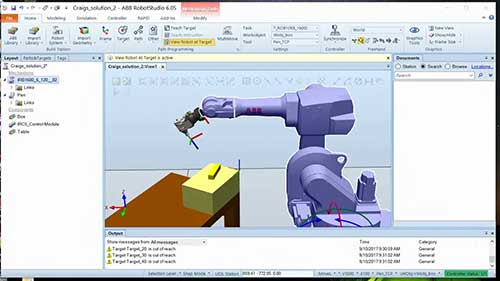
RobotStudio离线编程教程6
本片演示了如何在RobotStudio中为工件添加目标的过程。
发那科机器人编程培训 04 打开和关闭夹爪
如何在示教器上编写打开和关闭机器人夹爪的程序?本期机器人编程课程将逐步演示编程步骤。
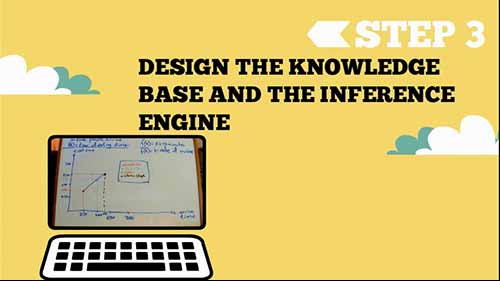
5步教你开发出专家系统
本视频展示了教你开发出专家系统的五个步骤,第一了解用户需求,第二找专家获取知识库的数据,第三构建知识库以及推理机,第四,设计输入和输出屏,第五创建出专家系统。
观看记录: