导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1745 播放
收藏
片段保存及分享
播放有问题?
请戳这里
多足机器人步态规划
时长:3 分钟
类别:智能机器人技术
简介:在本视频中,我们提出了一种混合整数双层规划的凸组合算法,以一种高效的计算方式同时规划接触位置、步态过渡。
标签:
教学
智能机器人技术
多足机器人
相关视频:
关于ROS的10大重点
ROS是一个机器人软件平台,它能为异质计算机集群提供类似操作系统的功能。我们介绍了ROS的10个重要知识点。
机器人是如何制造的
机器人已经广泛应用到了制造业当中。但现在,它们正在走进我们的日常生活。了解目前的技术是如何实现让机器人在生活的方方面面协助人类的吧,顺便看看机器人是如何制造出来的!
了解ROS话题通信
我们将在ROS中启动几个节点并对它们进行内省,以便了解什么是ROS话题通信。
QT机器人
QT机器人是一种表情丰富、引人入胜的机器人,可作为工具帮助自闭症谱系障碍儿童学习。通过在治疗师、教师和孩子之间起到中介作用,QT机器人改善了儿童的参与和合作,增强了他们的学习机会。
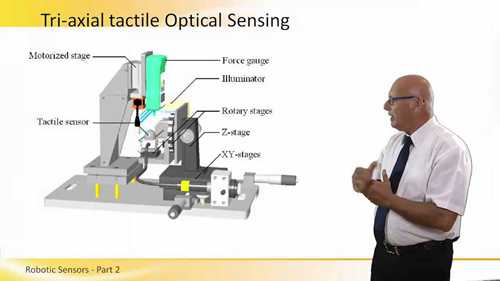
机器人用传感器2
在该教程的第一部分中,我们学习了常用的机器人传感器,那么在这一集里我们将学习一些较特殊的传感器,如,扫描传感器,旋转传感器,障碍物探测器,红外温度传感器,极化传感器等。
RoverS5安保机器人
ROVERS5机器人复合体是为沿人行道自主移动和无线传输内置视频摄像头拍摄的视频图像而设计的。这款安保机器人由带有电动驱动的轮式底盘、自动驾驶系统引导的以及独立视频监控系统组成。
Angatec多功能消防机器人
AngatecTEC800是市场上最多功能的消防机器人。本片将展示这款消防机器人的功能。
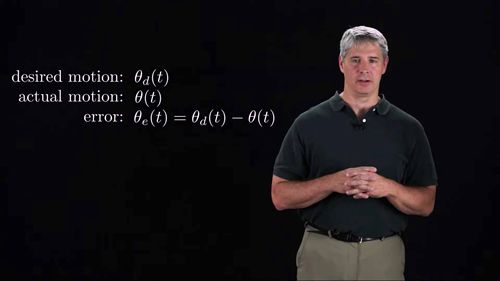
误差响应
在这一集中,我将介绍一个被控制系统的误差响应,并根据其稳态误差和瞬态响应来描述误差响应。
观看记录: