导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
169 播放
收藏
片段保存及分享
播放有问题?
请戳这里
如何创建ROS工作空间02
时长:12 分钟
类别:智能机器人技术
简介:学习如何在运行在虚拟机上的Ubuntu20.04上安装ROSNoetic。安装完成后,你将能够在终端上启动ROS环境。
标签:
教学
智能机器人
机器人操作系统
相关视频:
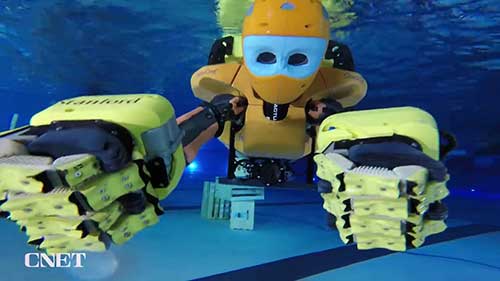
与水下机器人一起潜水
由斯坦福大学机器人实验室开发的OceanOneK可以在水下潜入1000米深处,同时保持人类的敏捷和灵巧。ClaireReilly与这款人形机器人一同下潜,对其进行了测试。
护理机器人
这是“RIBA-II”,一款可将病人从病床上抬起到轮椅上的护理机器人。
柔性机器人的阻抗控制
装备有可变刚度执行器的柔性机器人对冲击具有鲁棒性并且能效高。然而,由于关节中存在真实的弹簧,即使电机不运动,软机器人也可能产生振荡。
了解机器人电源
机器人要想动起来,需要多大电压,多大电流?我们将在视频中讲解机器人的电池组和电源。
利用深度强化学习规划四足步态
ETH的Anymal研究团队为感知地形运动制订了特定的神经网络策略,在模拟三维环境中,分别使用“本体感受”和“外在感受”来执行“落脚点与肢体联动规划”。
多足机器人步态规划
在本视频中,我们提出了一种混合整数双层规划的凸组合算法,以一种高效的计算方式同时规划接触位置、步态过渡。
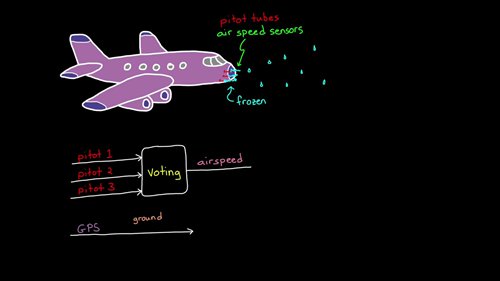
传感器融合与跟踪1
本视频概述了传感器融合的概念,以及它对于设计自主系统所起到的作用。
用大脑来控制物体
OpenBCI是一个基于脑机接合的开源硬件,它允许艺术家、设计师和工程师进行创新,同时作为研究和创新的工具。你可以在这里用大脑控制玩具蜘蛛,玩具鲨鱼。
观看记录:







 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问