导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
229 播放
收藏
片段保存及分享
播放有问题?
请戳这里
新型微创手术机器人
时长:4 分钟
类别:智能机器人技术
简介:我们展示了一种全新的微创手术机器人。Memic的Hominis系统是一种新型的手术机器人,专门设计用于经阴道进入,协助外科医生做妇科手术。
标签:
教学
智能机器人
手术机器人
相关视频:
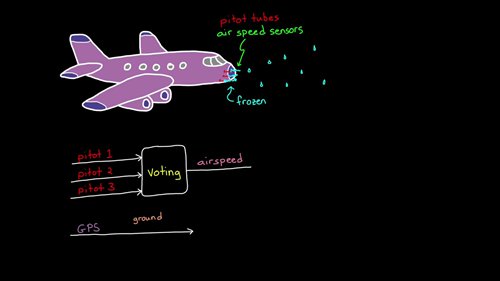
传感器融合与跟踪1
本视频概述了传感器融合的概念,以及它对于设计自主系统所起到的作用。
正向运动学1
我将在视频中介绍开链机器人正运动学中,在空间坐标系中表示的指数积公式。
触觉传感器工作原理
现成的夹具必须预先为每个要处理的独特物品编程,并且无法适应物体属性的变化,比如重量。而使用我们的触觉传感器,夹持参数可以实时确定,并且可以动态地施加最佳夹持力。
太空机器人
欧洲航天局机器人工程师马丁在节目中讨论了一些即将到来的涉及机器人的太空探索任务。
手术机器人的发展
手术机器人是一项医疗技术创新,旨在减少侵入性手术的误差范围,有助于使外科手术更安全、更精确。医疗保健正在经历技术颠覆,手术机器人的发展正在帮助外科医生进行更少侵入性的手术。
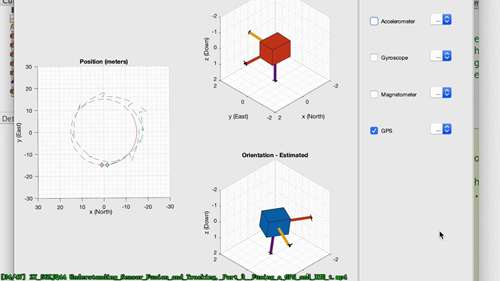
传感器融合与跟踪3
我将继续接着上一集的内容讨论使用传感器融合来定位的方法。
太空机器人的合作
多机器人合作是被视为行星探索中有前景的几项关键技术之一。在PRO-ACT项目中,这些技术得到了应用和进一步发展,这些机器人系统预计将共同执行任务。
利用深度强化学习规划四足步态
ETH的Anymal研究团队为感知地形运动制订了特定的神经网络策略,在模拟三维环境中,分别使用“本体感受”和“外在感受”来执行“落脚点与肢体联动规划”。
观看记录:







 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问