导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1741 播放
收藏
片段保存及分享
播放有问题?
请戳这里
正向运动学1
时长:7 分钟
类别:智能机器人技术
简介:我将在视频中介绍开链机器人正运动学中,在空间坐标系中表示的指数积公式。
标签:
教学
智能机器人技术
正向运动学
相关视频:
阿西莫机器人发展史
阿西莫是一种智能机器人,由日本本田公司于1986年开始研制,那么在这40多年的时间里,这款类人机器人取得了怎样的进展呢?我们将为你回顾阿西莫的发展史。
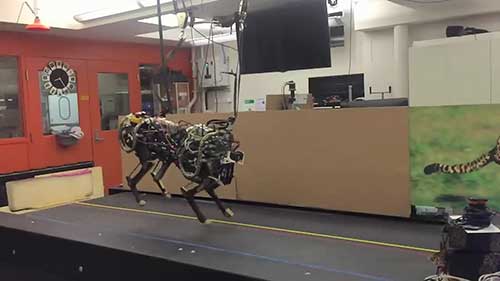
机器猎豹自主避障
在机器人的飞速发展过程中,麻省理工学院的研究人员训练了一只机器猎豹,使其能够在奔跑时看到并跳过障碍物。这使得这款四足机器人成为首个能够自主奔跑并跳过障碍物的机器人。
救援机器人
救援机器人用于在不同类型的环境中进行搜索和救援行动。
机器人非化学除草演示
SmallRobotCompany将机器人和人工智能结合以实现农业需求的自动化。SmallRobot的产品包括Tom机器人、Dick机器人和Harry机器人。片中展示了这些机器人进行非化学除草的过程。
逆向运动学2
这个视频介绍了数值逆运动学的牛顿-拉夫逊求根方法。末端执行器的构型由一个最小坐标集合表示。
正向运动学3
我将在视频中演示指数积正运动学在RRRP机器人手臂上的应用。
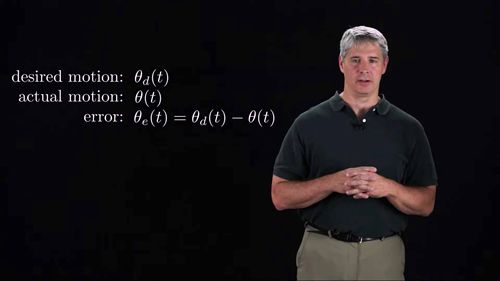
误差响应
在这一集中,我将介绍一个被控制系统的误差响应,并根据其稳态误差和瞬态响应来描述误差响应。
柔性机器人
有了我们的触觉传感器,夹持参数可以实时确定,并且可以动态地施加最佳夹持力。机器人通常不是柔软的,但是受章鱼启发,工程师正在创建能够扭曲解决刚性机器人无法处理的问题的机器人。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问