导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
271 播放
收藏
片段保存及分享
播放有问题?
请戳这里
Thorvald农业机器人
时长:4 分钟
类别:智能机器人技术
简介:Thorvald是由挪威奥斯陆大学(NMBU)的机器人和控制组开发的一种机器人平台。这个平台旨在为农业和园艺领域提供自动化解决方案,以帮助农民和园艺工作者进行种植、收获和其他农业任务。
标签:
教学
智能机器人
农业机器人
相关视频:
控制系统概述
机器人控制方法多种多样,本视频概述了运动(或位置)控制、力控制、混合运动力控制和阻抗控制等。
仿生机械手 03 仿生手指原型设计
使用FDM打印和Arduino,在Fusion 360中进行设计仿生手指原型,最后测试仿生手的三个连续关节。
仿海扁虫机器人
你知道海扁虫是怎么游的吗?没关系,看看这个仿海扁虫机器鱼,你就知道了!
太空机器人
欧洲航天局机器人工程师马丁在节目中讨论了一些即将到来的涉及机器人的太空探索任务。
带速度输入的运动控制3
这段短片介绍了机器人的任务空间运动控制,其中控制输入为关节速度,末端执行器的期望运动表示为SE(3)中的位形X。
农业机器人的未来
农业机器人的出现确实为农业带来了很多好处。从草莓采摘机器人和稻田机器鸭,到运行水培垂直农场的机器人。这些机器人都使农场运作更加高效。
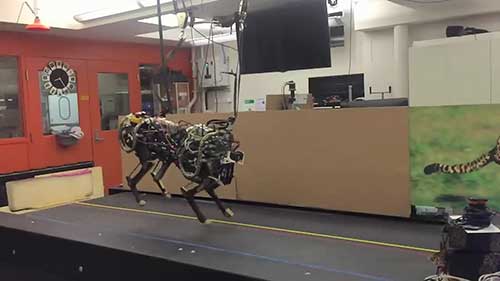
机器猎豹自主避障
在机器人的飞速发展过程中,麻省理工学院的研究人员训练了一只机器猎豹,使其能够在奔跑时看到并跳过障碍物。这使得这款四足机器人成为首个能够自主奔跑并跳过障碍物的机器人。
正向运动学1
我将在视频中介绍开链机器人正运动学中,在空间坐标系中表示的指数积公式。
观看记录: