导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
247 播放
收藏
片段保存及分享
播放有问题?
请戳这里
如何校准IRC5机器人控制器
时长:5 分钟
类别:工业机器人技术
简介:我们将讨论六轴机器人以及如何校准IRC5控制器,当你没有校准摆锤工具时如何在IRC5上进行精细校准。
标签:
教学
工业机器人
工业机器人控制器
相关视频:
FANUC电弧焊机器人
发那科提供了工业机器人领域最全面的产品线,使制造商能够利用FANUC各应用领域的机器人,形成自动化解决方案,帮助提高质量和生产效率。这段视频展示了利用FANUC机器人进行电弧焊的可能性。
焊接机器人与焊接自动化
由UniversalRobotsUR10e协作机器人驱动的DIYVectisCobot焊接工具可实现焊接自动化,快速换模和优化生产。
工业机器人的维修和翻新
工业机器人的定期维护、维修可以恢复机器人的可靠性,延长设备的使用寿命。
偏移量在优化代码中的作用
我们的FANUC绿色协作机器人CR-7向我们展示了偏移量在优化代码中的作用。
如何安装RobotWare软件
RobotWare是机器人系统的软件版本。获取有关如何在OmniCore系统上安装RobotWare的逐步指导。
IRC5控制器:紧急停止
介绍了ABB第五代机器人控制器IRC5最常见的停止功能——紧急停止。
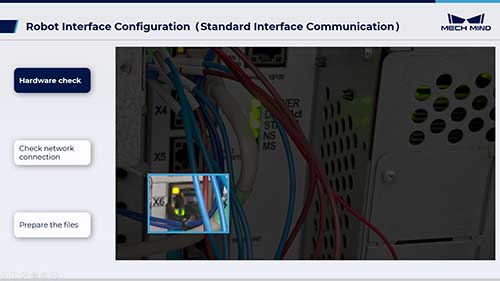
ABB机器人标准接口通信配置
本教程讲解了将程序文件加载到各种机器人中并使用不同的通信模式与机器人建立通信所需的操作步骤。这个视频演示了如何将程序文件加载到ABB机器人中,以建立机器人与Mech-Mind视觉系统之间的连接。
FANUC机器人定预防性维护1
学习如何对FANUCR-2000iC165F地面安装机器人进行定期维护。Acieta的机器人系统工程师ChrisBosquez将详细介绍添加润滑脂和更换电池的步骤。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问