导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1832 播放
收藏
片段保存及分享
播放有问题?
请戳这里
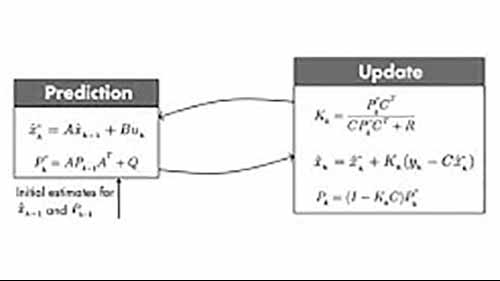
卡尔曼滤波器 6在Simulink中使用扩展卡尔曼滤波器
时长:6 分钟
类别:智能产品开发与应用
简介:您将学习如何配置扩展卡尔曼滤波器模块参数,例如状态转换和测量函数,并生成C/C ++代码。
标签:
教学
智能产品开发
MATLAB
相关视频:
什么是设计思维
在这个设计思维的教程中,我们将探讨什么是设计思维,为什么设计思维很重要,设计思维的五个阶段和四个支柱。它对于解决定义不明确或未知的问题非常有帮助。设计思维是一种迭代的方法,它可以帮助解决用户问题,或者用不同的策略和解决方案重新定义问题。
卡尔曼滤波器 3最优状态估计算法和方程
实际上,卡尔曼滤波器就是一种状态观测器,但它是为随机系统设计的。这就是卡尔曼滤波器方程和我们讨论概率密度函数之间的关系。
5分钟解释Hadoop
Hadoop是著名的大数据框架。这段关于Hadoop的视频将帮助你熟悉大数据这个术语,并帮助你理解Hadoop的重要性。这里还将介绍Hadoop的三个主要组件,即HDFS、MapReduce和YARN。最后,我们会有一个关于Hadoop的小测试。Hadoop是一个以分布式方式管理大数据存储且并行处理的框架。现在,让我们开始学习关于Hadoop的所有内容。
人工智能入门教程
这段人工智能教程的视频将帮助您了解什么是人工智能,人工智能的类型,实现人工智能的方法和人工智能的应用。最后,我们还将在TensorFlow上实现一个用例,在这个用例中我们将预测一个人是否患有糖尿病。人工智能是一种让计算机、计算机控制的机器人或软件以类似人类思维的方式进行智能思考的方法。人工智能通过研究人类大脑的模式和分析认知过程来实现。人工智能将成为科技领域的下一件大事。
卡尔曼滤波器 4非线性状态估算器
如果您是工程师,您经常会需要处理非线性系统。为了帮助您,我们将讨论非线性状态估算器。
苹果的下一个重大产品:苹果眼镜
多年来,围绕苹果AR眼镜的传言一直在科技界流传。尽管这样的猜测已经持续了很长一段时间,但我们似乎终于要迎来苹果下一款重要产品的发布了。虽然苹果设计的AR眼镜将带来什么样的功能还不清楚,但我们已经看到了传言,苹果的AR眼镜可能会包括一个麦克风,以支持Siri命令和电话通话。我们也看到有报道称,该设备将与其他功能集成一起。
马斯克要把人脑与AI结合
没看错,埃隆·马斯克又开公司了……根据《华尔街日报》消息,SpaceX和特斯拉的首席执行官埃隆·马斯克,正在筹备一家名为Neuralink的脑机接口的公司。马斯克表示,Neuralink将促进他将人类和人工智能融合的使命,进而拯救人类于人工智能。
5款最先进的人形机器人
不到30年前,先进的机器人只是一个充满希望的梦想和未来的愿景。快进到今天,由于科学和技术的不断进步,这些愿景已成为现实。今天,我们将来看一看现实生活中的机器人,让你认为未来就是现在!
观看记录:



 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问