导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1793 播放
收藏
片段保存及分享
播放有问题?
请戳这里
人工智能在自动驾驶汽车设计中的作用
时长:5 分钟
类别:汽车智能技术
简介:Mobileye联合创始人、董事长兼首席技术官Amnon Shashua教授在本次主题演讲中讨论了实现自动驾驶必须解决的三大技术支柱。此外,通过使用虚拟模拟,他揭示了实施案例。本视频是他在2017博世互联世界大会上的演讲要点。
标签:
教学
汽车智能技术
AI
相关视频:
测试无人驾驶汽车
在世界上最混乱的街道上测试无人驾驶汽车,听起来不是个好主意。加入我们的行列,我们将从英特尔旗下的Mobileye公司出发,绕耶路撒冷一圈。
Waymo全自动驾驶之旅
Waymo始于2009年的谷歌自动驾驶汽车项目。今天,我们拥有世界上唯一在公共道路上配备全自动驾驶汽车的车队。进入我们的360°视频,并掌控摄像头,通过我们汽车的“眼睛”看。然后,成为世界上第一个使用Waymo的人。
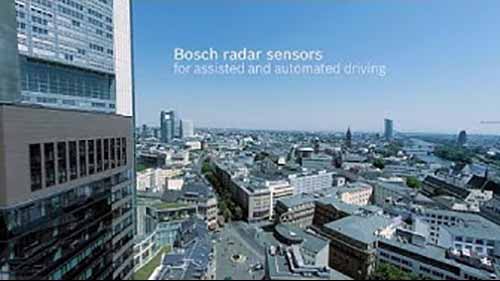
博世辅助自动驾驶的雷达传感器
在辅助自动驾驶过程中,车辆必须始终能够可靠地检测到人和物体,并对此做出正确的反应。博世雷达传感器由于其探测距离远、视场宽、角度可分性突出和新的Chirp序列调制功能,使得快速、精确和弹性的目标检测和跟踪变得容易。这使得它非常适合复杂的交通场景。
特斯拉自动驾驶仪的工作原理
每一辆新特斯拉(包括Model 3)都配备了自动驾驶仪所需的硬件。自动驾驶仪是特斯拉的自适应巡航控制系统,最终有望支持全自动驾驶。然而,如果你想使用这些功能,你需要在购买新车时支付5000美元来激活,如果你以后决定购买,则需要支付7000美元。支持自动驾驶仪的硬件是什么?你如何使用它?这个功能值5000美元吗?本视频试图解释这个系统是如何工作的,如何使用它,以及作为消费者的你是否有必要购买它。
自动驾驶汽车(CAV)技术
随着技术的进步和更多地融入我们的生活,它也在进一步融入我们的个人交通工具和交通系统。佛罗里达交通部和佛罗里达收费公路认识到,自动车辆技术在帮助减少交通拥堵和提高道路安全方面拥有前所未有的机遇。
BMW智能私人助理
智能汽车的终极模样是什么?关于这个问题,漫威早就给出了答案。未来的汽车将会搭载一个“私人助理”,拥有高度拟人化的智能交互系统,只要你用交谈式的语言说出命令,TA就可以迅速领会并协助你解决问题,像钢铁侠的“贾维斯”一样聪明伶俐。BMW智能个人助理,就好似这样一位隐形的得力助手,是既懂车又懂你的最佳副驾驶。面对这位“助理”,用户只需说出“你好,宝马”便能与它交流。
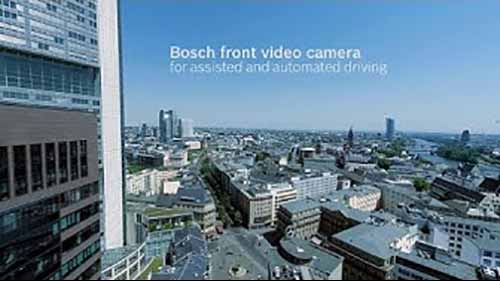
博世辅助自动驾驶的前置摄像头
博世的前置摄像头在驾驶员辅助系统中起着关键作用,因为它能让车辆在任何时候都能可靠地探测到人和物体。最佳的图像处理算法与人工智能方法相结合,保证了目标检测的弹性。这也使它们适合未来的应用,包括基于视频的驾驶辅助系统和自动驾驶。
Mobileye前向避碰系统
Mobileye提供最先进的技术,可支持目前市场上所有与安全性和便利性相关的重要功能,包括:自动紧急制动,车道偏离报警,行人检测,自适应远光灯,自适应巡航控制,交通标志识别,前向碰撞警报系统。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问